
Sie haben sicher schon verschiedene Schnittstellen auf den Leiterplatten vieler elektronischer Geräte gesehen, wie GPIO, I2C, SPI, UART, VERWENDEN, USB, usw. Sie müssen neugierig auf die Arbeitsprinzipien sein, Zwecke, und Unterschiede zwischen diesen Schnittstellen auf den Leiterplatten. Heute, Unser Redakteur besuchte Kollegen aus der technischen Abteilung der Firma UGPCB, um ihre Probleme zu erläutern “wahre Natur.”
Kommunikationsschnittstellen
Einfache Unterschiede
1) GPIO (Allgemeine Eingabe-Ausgabe) ist eine universelle Ein-/Ausgabe, allgemeiner Hafen, Bus-Extender, der die I/O-Erweiterung mithilfe des Industriestandards I2C vereinfacht, SMBus™, oder SPI™ Schnittstellen. Wenn Mikrocontroller oder Chipsätze nicht über genügend I/O-Ports verfügen, oder wenn Systeme eine serielle Fernkommunikation oder -steuerung erfordern, GPIO-Produkte können zusätzliche Steuerungs- und Überwachungsfunktionen bereitstellen.
2) SPI (Serielle Peripherieschnittstelle) ist ein standardmäßiger synchroner bidirektionaler serieller Vierdrahtbus. Die SPI-Schnittstelle wird hauptsächlich im EEPROM verwendet, BLITZ, Echtzeituhren, AD-Wandler, und zwischen digitalen Signalprozessoren und digitalen Signaldecodern. SPI ist eine Hochgeschwindigkeitsschnittstelle, Vollduplex, synchroner Kommunikationsbus, der nur vier Pins auf dem Chip belegt, Das spart Pin-Anzahl und Platz im PCB-Layout. Aufgrund seiner einfachen und benutzerfreundlichen Eigenschaften, Immer mehr Chips integrieren dieses Kommunikationsprotokoll.
3) ICH2C (Inter-IC-Bus) ist ein von PHILIPS entwickelter zweiadriger serieller Bus zur Verbindung von Mikrocontrollern und deren Peripheriegeräten. Es handelt sich um einen weit verbreiteten Busstandard im Bereich der mikroelektronischen Kommunikationssteuerung. Es hat den Vorteil, dass es weniger Schnittstellenleitungen gibt, einfache Kontrollmethoden, Verpackungsformen für kleine Geräte, und höhere Kommunikationsraten.
4) UART (Universeller asynchroner Empfängersender) ist ein universelles asynchrones Empfänger-/Sendergerät.
5) USART Universeller synchroner asynchroner Empfänger-Sender;
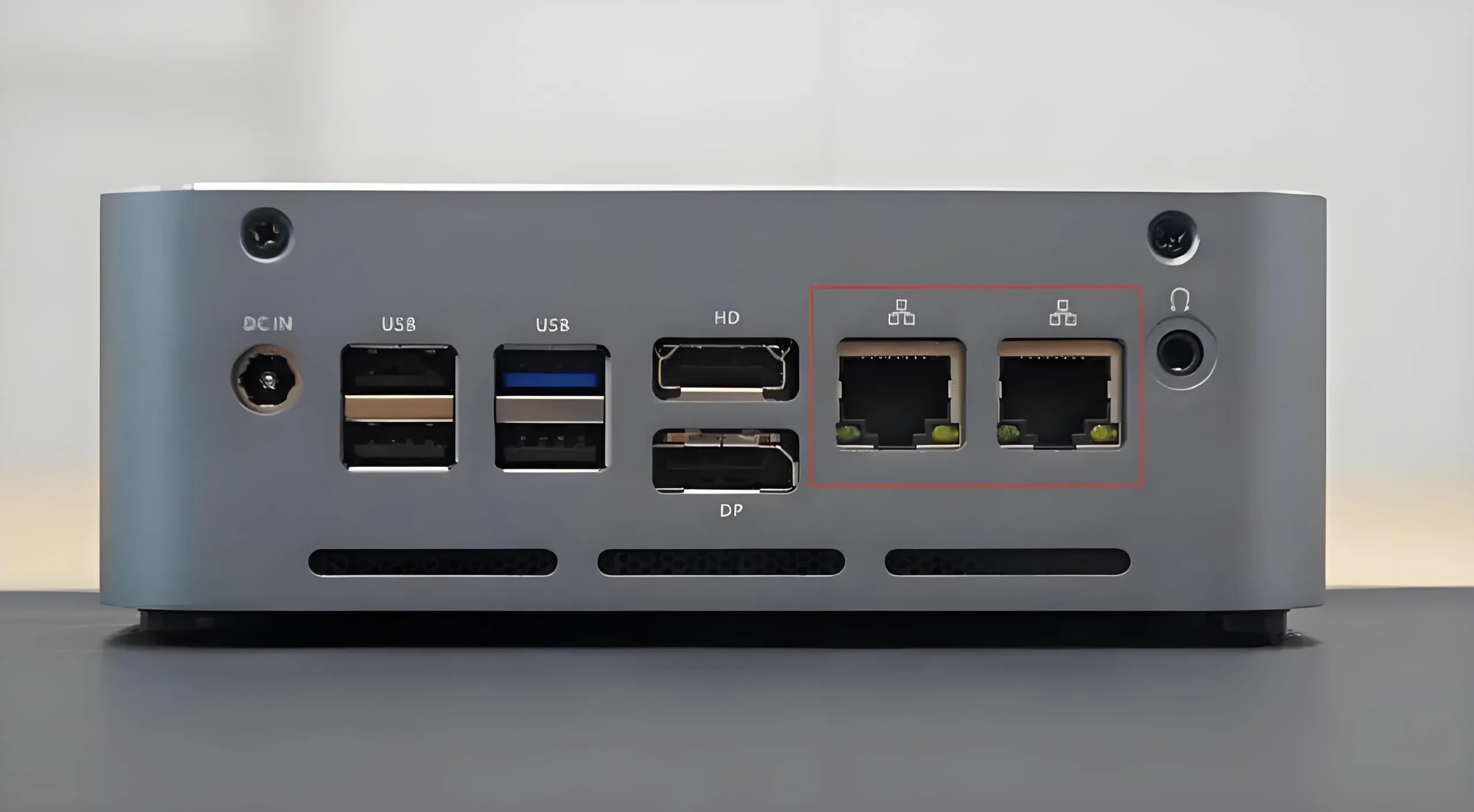
6) USB Universal Serial Bus (Universeller serieller Bus)
7) CAN-Feldbus
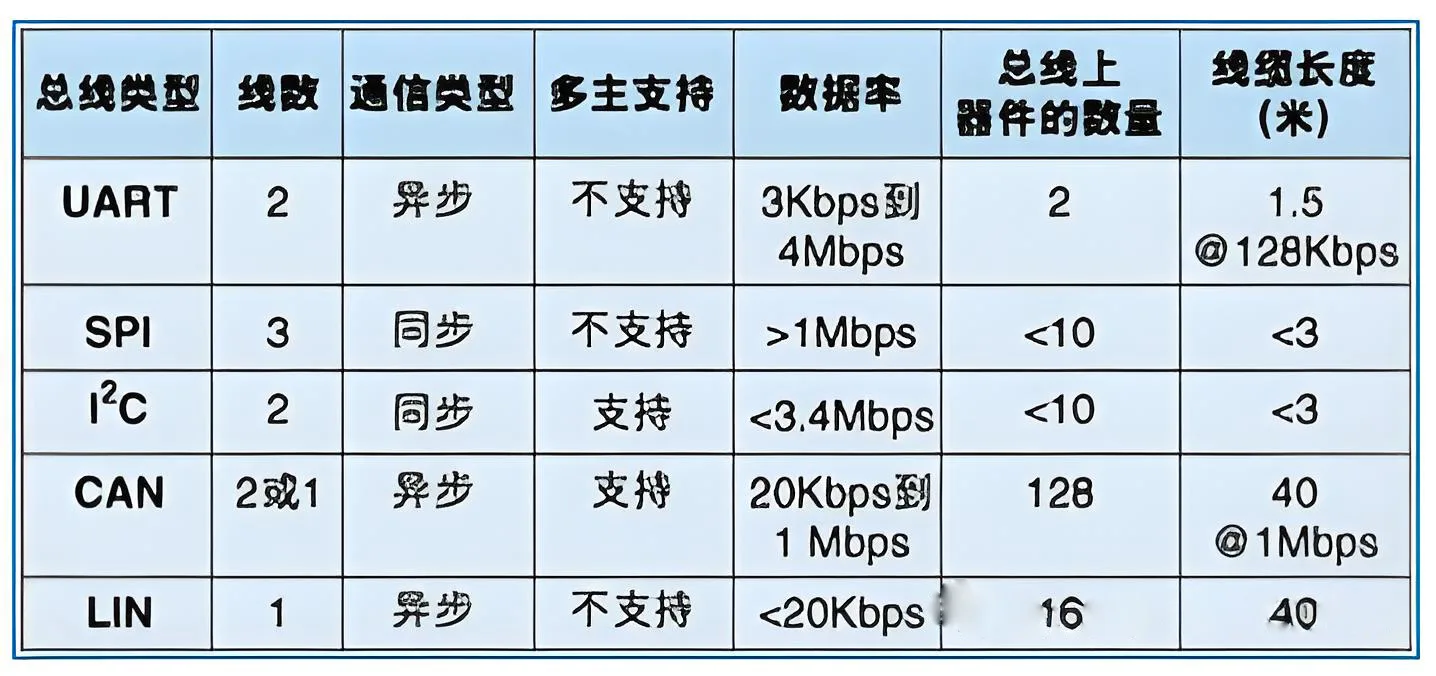
Tabelle der Schnittstellenübertragungsparameter
Zusammensetzung der Übertragungsdatenleitungen
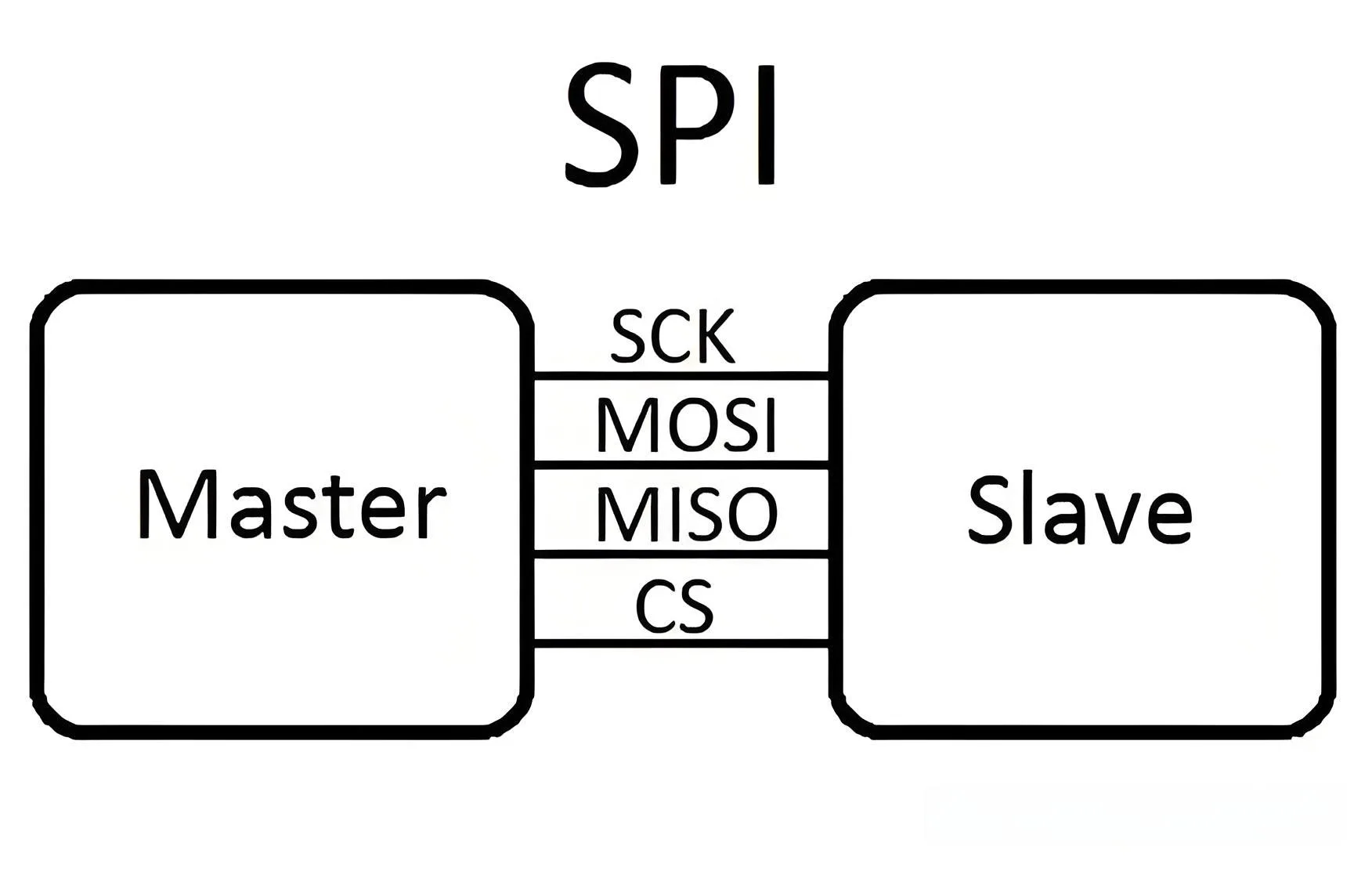
Der SPI-Bus besteht aus drei Signalleitungen Serial Clock (SCLK), Serielle Datenausgabe (SDO), und serielle Dateneingabe (SDI). Der SPI-Bus kann mehrere SPI-Geräte verbinden. Das SPI-Gerät, das den SPI-Takt bereitstellt, ist das Master- oder Hauptgerät (Master), während andere Geräte Slaves oder Slave-Geräte sind (Sklave). Master- und Slave-Geräte können eine Vollduplex-Kommunikation erreichen. Wenn mehrere Slave-Geräte vorhanden sind, Es kann eine zusätzliche Slave-Auswahlleitung hinzugefügt werden.
Bei Simulation des SPI-Busses mit allgemeinen IO-Ports, Es ist notwendig, einen Ausgangsport zu haben (SDO), ein Eingangsport (SDI), und abhängig von der Art des implementierten Geräts, ein anderer Port, wenn Master- und Slave-Geräte implementiert werden, erfordert sowohl Eingangs- als auch Ausgangsanschlüsse; wenn nur Master-Geräte implementiert werden, ein Ausgangsport ist ausreichend; wenn nur Slave-Geräte implementiert werden, Es wird ein Eingangsport benötigt.
Der I2C-Bus ist ein Zwei-Wege-Bus, zweiadrig (SCL, SDA), seriell, Multi-Master-Schnittstellenstandard mit einem Bus-Arbitrierungsmechanismus, Dadurch eignet es sich sehr gut für den Nahbereich, seltene Datenkommunikation zwischen Geräten. In seinem Protokollsystem, bei der Datenübertragung, Die Adresse des Zielgeräts ist enthalten, Ermöglicht die Vernetzung von Geräten.
Bei der Simulation des I2C-Busses mit allgemeinen IO-Ports für bidirektionale Übertragung, ein Ein-/Ausgangsport (SDA) ist nötig, und ein weiterer Ausgangsport (SCL) ist erforderlich. (Hinweis: Mein Verständnis von I2C ist relativ begrenzt, Daher ist diese Beschreibung möglicherweise unvollständig.)
Der UART-Bus ist eine asynchrone serielle Schnittstelle, Daher ist die Struktur im Allgemeinen wesentlich komplexer als bei den beiden vorherigen synchronen seriellen Schnittstellen (wie in Mikrocontroller-Büchern beschrieben, obwohl es nicht als komplex angesehen wird). Es besteht im Allgemeinen aus einem Baudratengenerator (Die generierte Baudrate ist gleich 16 mal die Übertragungsbaudrate), ein UART-Empfänger, und ein UART-Sender, mit zwei Drähten in Hardware, eine zum Senden und eine zum Empfangen.
Deutlich, wenn der UART-Bus mit allgemeinen IO-Ports simuliert wird, Es sind ein Eingangs-Port und ein Ausgangs-Port erforderlich.
Ab dem zweiten Punkt, Es ist offensichtlich, dass SPI und UART Vollduplex erreichen können, aber I2C kann nicht.
Unterschiede im Kommunikationsprotokoll
SPI
SPI
SPI ist ein Protokoll, das es einem Master-Gerät ermöglicht, eine synchrone Kommunikation mit einem Slave-Gerät zu initiieren, Dadurch wird der Datenaustausch abgeschlossen. Diese Kommunikationsmethode hat den Vorteil, dass weniger Ports belegt werden; allgemein, Vier reichen für eine grundlegende Kommunikation. Gleichzeitig, Auch die Übertragungsgeschwindigkeit ist sehr hoch. Allgemein, Es erfordert, dass das Master-Gerät über einen SPI-Controller verfügt (aber es kann auch simuliert werden) zur Kommunikation mit SPI-basierten Chips.
Das Kommunikationsprinzip von SPI ist sehr einfach; es erfordert mindestens vier Drähte, es können aber auch drei genügen. Sie sind allen SPI-basierten SDI-Geräten gemeinsam (Dateneingabe), SDO (Datenausgabe), SCK (Uhr), CS (Chipauswahl). Der CS steuert, ob der Chip ausgewählt wird, Dies bedeutet, dass Operationen auf diesem Chip nur dann wirksam sind, wenn das Chipauswahlsignal auf einem vorgegebenen Freigabesignal liegt (hohes oder niedriges Niveau). Dadurch können mehrere SPI-Geräte an denselben Bus angeschlossen werden.
Als nächstes folgen die drei Linien, die für die Kommunikation verantwortlich sind. Die Kommunikation erfolgt durch Datenaustausch. Hier, Es ist wichtig zu wissen, dass SPI ein serielles Kommunikationsprotokoll ist, Das bedeutet, dass Daten Stück für Stück übertragen werden. Aus diesem Grund existiert die SCK-Taktleitung. Der SCK stellt Taktimpulse bereit, und SDI, SDO führt die Datenübertragung basierend auf diesen Impulsen durch. Die Datenausgabe erfolgt über die SDO-Leitung; Daten ändern sich bei der steigenden oder fallenden Flanke des Takts und werden bei der unmittelbar folgenden fallenden oder steigenden Flanke gelesen. Auf diese Weise ist ein Bit der Datenübertragung abgeschlossen. Die Eingabe erfolgt nach dem gleichen Prinzip. Daher, mindestens acht Änderungen im Taktsignal (Ein Auf- und Ab-Zyklus stellt eine Änderung dar) ermöglichen die Übertragung von 8 Datenbits.
Es ist zu beachten, dass die SCK-Signalleitung nur vom Master-Gerät gesteuert wird, und Slave-Geräte können die Signalleitung nicht steuern. Ähnlich, in einem SPI-basierten Gerät, Es muss mindestens ein Master-Gerät vorhanden sein.
Diese Übertragungseigenschaft hat im Gegensatz zur herkömmlichen seriellen Kommunikation einen Vorteil gegenüber der typischen seriellen Kommunikation, was zumindest überträgt 8 Datenbits kontinuierlich, SPI ermöglicht die bitweise Übertragung von Daten, und ermöglicht sogar eine Pause, da die SCK-Taktleitung vom Master-Gerät gesteuert wird. Wenn es keinen Taktübergang gibt, Das Slave-Gerät sammelt oder überträgt keine Daten. Mit anderen Worten, Das Master-Gerät kann die Kommunikation durch Steuerung der SCK-Taktleitung steuern.
SPI ist auch ein Datenaustauschprotokoll, da die SPI-Dateneingangs- und -ausgangsleitungen unabhängig sind, Sie ermöglichen die gleichzeitige Durchführung der Dateneingabe und -ausgabe.
Verschiedene SPI-Geräte haben unterschiedliche Implementierungen, hauptsächlich im Hinblick darauf, wann sich Daten ändern und erfasst werden, mit unterschiedlichen Definitionen für die Erfassung an der steigenden oder fallenden Flanke des Taktsignals. Für spezifische Details, Bitte beachten Sie die Dokumentation der jeweiligen Geräte.
ICH2C
Es werden lediglich zwei Busleitungen benötigt, eine serielle Datenleitung SDA und eine serielle Taktleitung SCL.
Jedes an den Bus angeschlossene Gerät kann mit einer eindeutigen Adresse und einer einfachen, per Software festgelegten Master-Slave-Beziehung angesprochen werden. Der Host kann als Master-Sender oder -Empfänger fungieren.
Es handelt sich um einen echten Multi-Master-Bus; wenn zwei oder mehr Master gleichzeitig die Datenübertragung initiieren, Konflikterkennung und Schlichtung verhindern Datenkorruption.
Serielle bidirektionale 8-Bit-Datenübertragungsraten können im Standardmodus bis zu 100 kbit/s erreichen, 400kbit/s im Schnellmodus, und 3,4 Mbit/s im Hochgeschwindigkeitsmodus.
On-Chip-Filter entfernen Störungen aus der Busdatenleitung, um die Datenintegrität sicherzustellen.
Die Anzahl der an denselben Bus angeschlossenen ICs ist nur durch die maximale Buskapazität von 400 pF begrenzt.
UART
Der UART-Bus ist eine asynchrone serielle Schnittstelle, Daher ist seine Struktur im Allgemeinen viel komplexer als die der beiden vorherigen synchronen seriellen Ports. Es besteht typischerweise aus einem Baudratengenerator (was eine Baudrate gleich generiert 16 mal die Übertragungsbaudrate), ein UART-Empfänger, und ein UART-Sender, mit zwei Drähten in Hardware, eine zum Senden und eine zum Empfangen.
UART wird häufig zur Steuerung von Computerchips für serielle Geräte verwendet. Zu beachten ist, dass es über eine RS-232C-Schnittstelle für Datenendgeräte verfügt, Ermöglicht Computern die Kommunikation mit Modems oder anderen seriellen Geräten über die RS-232C-Schnittstelle.
UART steht für Universal Asynchronous Receiver/Transmitter (asynchroner serieller Kommunikationsanschluss). Es enthält Standards und Spezifikationen für Schnittstellen wie RS232, RS499, RS423, RS422, und RS485, Damit ist UART ein allgemeiner Begriff für asynchrone serielle Kommunikationsanschlüsse. RS232, RS499, RS423, RS422, und RS485 sind Schnittstellenstandards und Spezifikationen für verschiedene asynchrone serielle Kommunikationsanschlüsse, elektrische Eigenschaften definieren, Übertragungsraten, Verbindungseigenschaften, und mechanische Eigenschaften der Schnittstellen. Sie gehören zur physikalischen Schicht (die unterste Schicht) Konzept im Kommunikationsnetzwerk und stehen nicht in direktem Zusammenhang mit Kommunikationsprotokollen. Kommunikationsprotokolle gehören zur Datenverbindungsschicht (die nächsthöhere Schicht) Konzept im Kommunikationsnetzwerk. Der COM-Port ist eine Abkürzung für den asynchronen seriellen Kommunikationsport eines PCs (Personalcomputer). Aus historischen Gründen, Die externe PC-Schnittstelle von IBM wurde als RS232 konfiguriert, wird zum De-facto-Standard in der PC-Industrie. Daher, Die COM-Anschlüsse moderner PCs sind alle RS232. Wenn mehrere asynchrone serielle Kommunikationsanschlüsse verfügbar sind, sie heißen COM1, COM2, usw.
Es ist klar, dass sowohl SPI als auch UART eine Vollduplex-Kommunikation erreichen können, aber I2C kann nicht.
USART Universeller synchroner asynchroner Empfänger und Sender. (Der Unterschied zu UART ist offensichtlich.)
Universeller asynchroner UART-Empfänger und -Sender;
USART Universeller synchroner asynchroner Empfänger und Sender. Allgemein, in Mikrocontrollern, Schnittstellen mit der Bezeichnung UART werden nur für die asynchrone serielle Kommunikation verwendet, während diejenigen mit dem Namen USART sowohl für die synchrone als auch für die asynchrone serielle Kommunikation verwendet werden können.
USB
USB steht für Universal Serial Bus, ein externer Busstandard für die Verbindung und Kommunikation zwischen einem Computer und externen Geräten, im PC-Bereich angewendet. USB unterstützt die Plug-and-Play- und Hot-Swap-Funktionen. USB wurde von einer Koalition vorgeschlagen, zu der auch Intel gehörte, Compaq, IBM, und Microsoft am Ende 1994.
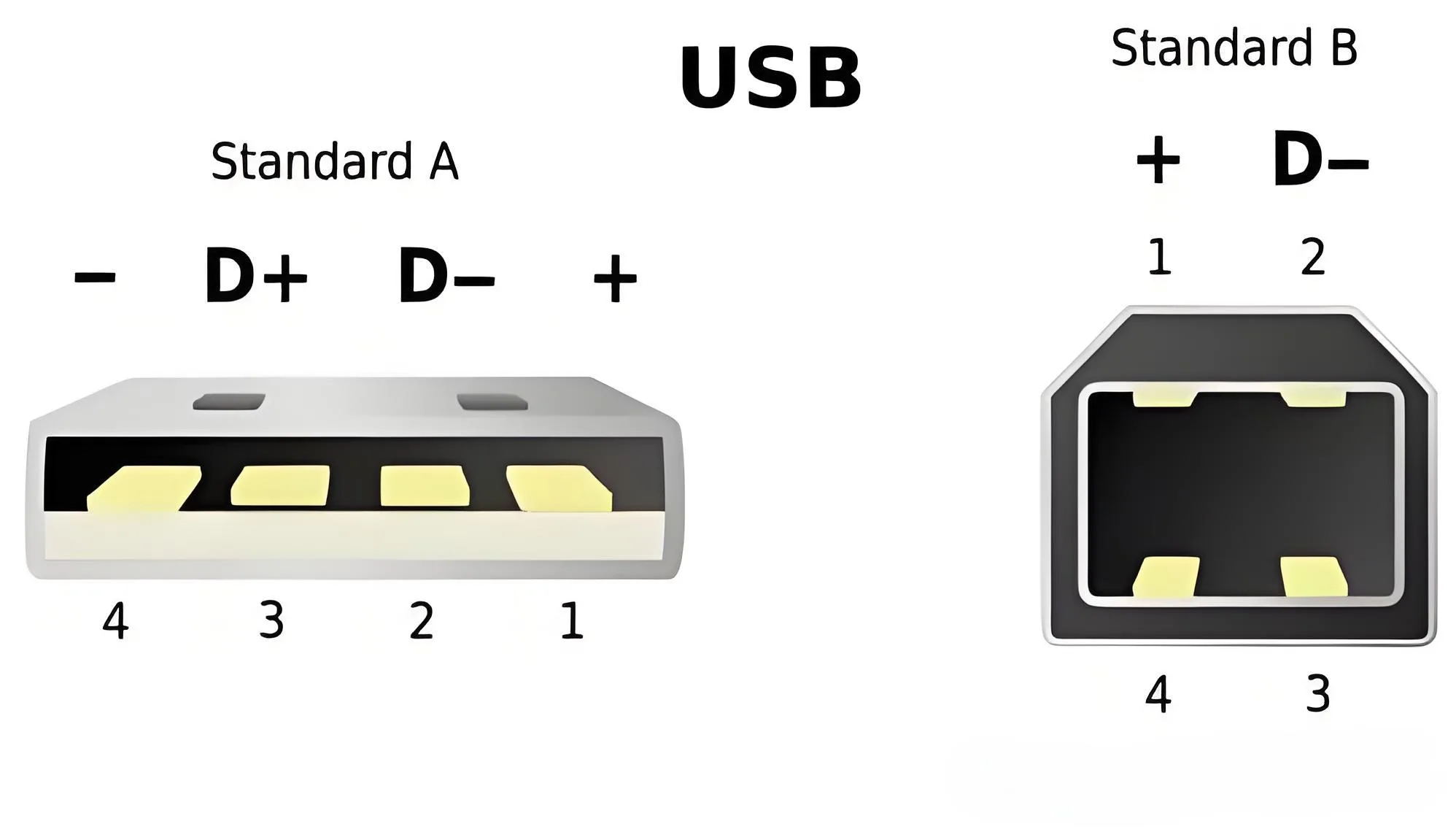
USB
Die elektrischen Eigenschaften und Übertragungseigenschaften von USB umfassen Hochgeschwindigkeits-USB-Transceiver wie Philips’ 82C251, SN65/75LBC031 von TI, Der CF150 von Bosch, C250, und Intersils UC5350; Zu den Low-Speed-USB-Transceivern gehört der Philips 82C252, TJA1053, Siemens TLE 6252G; Zu den Single-Wire-USB-Transceivern gehört der Philips AU5790, Infineon TLE 6255, Delphi DK166153.
DÜRFEN
Wenn der Bus im Leerlauf ist, Jeder CAN-Knoten kann die Datenübertragung starten. Wenn zwei oder mehr Knoten gleichzeitig mit der Übertragung beginnen, Die identifikatorbasierte, bitweise Arbitrierung löst Zugriffskonflikte. CAN ist ein Broadcast-Bus, bei dem alle Knoten Daten vom Bus empfangen, und ein Hardware-Filtermechanismus bestimmt, ob die Nachricht dem Knoten bereitgestellt wird.
Es gibt vier Arten von Nachrichtenrahmen: Datenrahmen, Remote-Frame, Fehlerrahmen, und Überlastrahmen.
Einfache CAN-Controller sind kostengünstig und verfügen über begrenzte Nachrichtenpuffer zum Senden/Empfangen und grundlegende CAN-Nachrichtenfilterungsmechanismen. Vollständige CAN-Controller bieten höhere Kosten und Leistung mit handhabbaren Puffern 8 oder mehrere Nachrichten zum Senden und Empfangen. Standard-CAN-Controller verarbeiten Nachrichten mit 11-Bit-Identifiern, während erweiterte CAN-Controller sowohl 11-Bit- als auch 29-Bit-Identifier-Nachrichten verarbeiten. Zeitgesteuertes CAN (TTCAN) Controller planen CAN-Nachrichten basierend auf Zeit und Ereignissen, Verbesserung der Gesamtleistung und Verhaltensvorhersagbarkeit des CAN-Netzwerks.
Datenbytes werden beginnend mit dem höchstwertigen Bit übertragen. In einem einzigen Sendevorgang kann ein 8-Bit-Datenbyte übertragen werden, wobei die maximale CAN-Bus-Geschwindigkeit 1 Mbit/s beträgt.
Die meisten CAN-Mikrocontroller benötigen einen externen Transceiver, um eine Verbindung zum physischen Bus herzustellen. Der Markt bietet Hochgeschwindigkeits-Transceiver wie Philips’ 82C251, SN65/75LBC031 von TI, Der CF150 von Bosch, C250, und Intersils UC5350; und langsame Transceiver wie Philips 82C252, TJA1053, und Siemens TLE 6252G.
Auswahl des seriellen Busses
Mikrocontroller (µC) sind das Herzstück moderner elektronischer Produkte, Kommunikation mit einem oder mehreren Peripheriegeräten erforderlich ist. Traditionell, µC-Peripheriegeräte wurden über speicherabgebildete Daten- und Adressbusse verbunden. Dieser Schnittstellentyp erfordert eine Mindestanzahl an Pins (ohne Strom und Erde) 8 (Daten) + 1 (R//W) + 1 (/CS) + n Adresszeilen [n = log2(Anzahl interner Register oder Speicherbytes)]. Zum Beispiel, Die Kommunikation mit einem 16-Byte-Peripheriegerät erfordert 8 + 1 + 1 + 4 = 14 Stifte. Diese Schnittstelle bietet einen schnellen Zugriff, erhöht jedoch aufgrund der größeren Anzahl von Pins die Gehäusegröße und die Gesamtkosten. Zur Reduzierung von Kosten und Verpackungsgrößen, Serielle Schnittstellen sind ideale Alternativen.
Die Auswahl eines seriellen Busses ist nicht einfach. Neben der Berücksichtigung der Datenraten, Reihenfolge der Datenbitübertragung (das höchstwertige Bit zuerst oder zuletzt), und Spannung, Designer sollten darüber nachdenken, wie sie ein Peripheriegerät auswählen (über Hardware-Chip-Auswahleingänge oder Softwareprotokoll), wie sich Peripheriegeräte mit µC synchronisieren (Verwendung einer Hardware-Taktleitung oder eingebetteter Taktinformationen im Datenstrom), ob Daten auf einer einzigen Leitung übertragen werden (zwischen wechseln “hoch” Und “niedrig”) oder auf einem Differentialpaar (Zwei Leitungen schalten gleichzeitig in entgegengesetzte Richtungen), und ob Kommunikationsleitungen an beiden Enden einen angepassten Widerstand verwenden (normalerweise für differenzielle Signalisierung), unübertroffen, oder an einem Ende zusammenpassen (üblich für Single-Ended-Busse). Tisch 1 zeigt Unterschiede zwischen verschiedenen gängigen Bussystemen in Matrixform. Nur vier davon 16 mögliche Kombinationen sind allgemein bekannt.
Abgesehen von diesen Eigenschaften, Für bestimmte Anwendungen können zusätzliche Anforderungen gelten, beispielsweise hinsichtlich der Stromversorgungsmethoden, Isolierung, Geräuschunterdrückung, maximal µC (Gastgeber) zur Peripherie (Sklave) Übertragungsentfernung, und Kabelverbindungsmethoden (Bustyp, Sterntyp, Verpolungsschutz, usw.). Anwendungen wie Gebäudeautomation, Industrielle Steuerung, Zählerstand, usw., haben Standards für solche Anforderungen festgelegt.
I²C/SMBus vs. 1-Drahtbus
Wenn die Anwendung eine Taktleitung bereitstellen kann, Die Busauswahl kann sich auf I²C/SMBus-Geräte erstrecken. Gemäß der SMBus-Spezifikation, Es kann als Ableitung der 100-kbit/s-I²C-Busspezifikation mit zusätzlichen Timeout-Funktionen angesehen werden. In Fällen, in denen ein Knoten die Synchronisierung mit dem Busmaster verliert, Die Timeout-Funktion verhindert eine Busblockierung, wohingegen das I²C-System einen Power-On-Reset erfordert, um solche Fehlerbedingungen zu beheben. Das 1-Wire-System setzt das Vorhandensein zurück bzw. erkennt es während der Initialisierungsphase der Kommunikationsschnittstelle.
Neben der Uhrenlinie, I²C/SMBus stellt für jedes auf dem Bus übertragene Byte ein Bestätigungsbit bereit, Reduzierung der effektiven Datenraten um 12%. Der Kommunikationsprozess beginnt mit einer Startbedingung, gefolgt von der Slave-Geräteadresse und einem Datenrichtungsbit (lesen/schreiben), endet mit einer Stoppbedingung. Für das 1-Wire-System, Zuerst müssen die Anforderungen der Netzwerkschicht erfüllt werden (d.h., Auswahl eines bestimmten Geräts über Such-ROM-Befehle oder Broadcasting), Anschließend werden Befehlscodes gesendet, die sich auf bestimmte Geräte beziehen und die Richtung der Datenübertragung beeinflussen (lesen/schreiben).
Ein bemerkenswertes Problem bei den ursprünglichen I²C- und SMBus-Bussystemen ist ihr begrenzter 7-Bit-Adressraum. Mit mehr als 127 verschiedene Gerätetypen verfügbar, Es ist unmöglich, allein aus der Slave-Adresse auf die Gerätefunktionalität zu schließen. Zusätzlich, Bei vielen I²C-Geräten können Benutzer ein oder mehrere Adressbits beliebig festlegen, um mehrere identische Geräte an den Bus anzuschließen, Dadurch wird der verfügbare Adressraum weiter reduziert. Bei der Lösung von Adresskonflikten wird das Bussystem in mehrere Segmente segmentiert, die jederzeit softwaregesteuert aktiviert werden können. Dies erfordert zusätzliche Hardware und verkompliziert die Anwendungs-Firmware. I²C-Systemen fehlen Funktionen zur Erkennung oder Aufzählung von Netzwerkknoten, Dies macht es schwierig, Netzwerke mit sich dynamisch ändernden Knotenzahlen zu verwalten. Dieses Problem wird durch das Adressauflösungsprotokoll in der SMBus-Spezifikationsversion behoben 2.013, obwohl unterstützte SMBus-Geräte selten sind.
SPI- und MICROWIRE-Schnittstelle
SPI und MICROWIRE (eine Teilmenge von SPI) erfordern eine zusätzliche Chip-Select-Leitung für jedes Slave-Gerät. Aufgrund des Chipauswahlsignals, Das SPI-Protokoll definiert nur Lese-/Schreibbefehle für Speicheradressen und Statusregister, ohne eine Bestätigungsfunktionalität bereitzustellen. Typischerweise, SPI-Geräte verwenden separate Pins für die Dateneingabe und -ausgabe. Da die Datenausgabe außer bei Lesevorgängen im Tri-State-Modus erfolgt, Die beiden Datenpins können miteinander verbunden werden, um eine einzige bidirektionale Datenleitung zu bilden. SPI-Busse werden dann eingesetzt, wenn andere Bussysteme nicht über die notwendigen Funktionalitäten verfügen oder höhere Datenübertragungsraten benötigt werden, Unterstützt Geschwindigkeiten von bis zu 2 Mbit/s oder höher. Jedoch, Das Generieren von CS-Signalen zur Adressierung bestimmter Geräte ist ein Nachteil von SPI und MICROWIREs. Wie I²C, Sie unterstützen keine Knotenerkennung. Der Host kann die Gerätefunktionalität nicht aus logischen Slave-Adressen ableiten, Dies erschwert die Verwaltung von Netzwerken mit sich dynamisch ändernden Knoten.
RS-485, LVDS, DÜRFEN, USB 2.0, und FireWire
Diese Standards veranschaulichen unterschiedliche Übertragungseigenschaften. Die schnellsten dieser Bussysteme sind FireWire und USB 2.0, die elektrische Punkt-zu-Punkt-Verbindungen nutzen. Mit erweiterten Knoten oder Hubs, Sie können virtuelle Busse mit Baumtopologien bilden, Senden von Datenpaketen von der Quelle zum Endpunkt (USB) oder Peer-to-Peer (FireWire), mit Burst-Datenraten von bis zu 480 Mbit/s (USB 2.0) oder 1600 Mbit/s (FireWire). Datenpakete mit begrenzter Größe und Empfangs-/Puffer-/Erneutsende-Kommunikationsmechanismen erhöhen die Übertragungszeit, Dadurch wird der effektive Datendurchsatz reduziert. Die Topologie und das Protokoll von USB ermöglichen bis zu 126 Knoten, während FireWire bis zu unterstützt 63 Knoten mit einem maximalen Knoten-zu-Knoten-Abstand von 4,5 m unter Verwendung passiver Kabel. Entwickelt für PC-Peripheriegeräte, Multimedia, Industrielle Steuerung, und Luftfahrtanwendungen (nur FireWire), USB- und FireWire-Geräte unterstützen Hot-Plugging. Diese Funktion ermöglicht dynamische Änderungen der Anzahl der Netzwerkknoten.
LVDS, RS-485, und CAN kann Bustopologien implementieren, die mehrere Hosts verbinden. Niederspannungsdifferenzsignalisierung (LVDS) bietet die höchste Geschwindigkeit unter diesen Standards, Kann mit 100 Mbit/s über Entfernungen von bis zu 10 m betrieben werden. Die tatsächliche Datenrate und der Durchsatz hängen von der Netzwerkgröße ab. Der elektrische LVDS-Standard ist für Backplane-Anwendungen konzipiert und unterstützt Hot-Plugging, enthält jedoch kein Protokoll.
RS-485 definiert auch nur elektrische Parameter, Angabe der Belastbarkeit und maximalen Belastungen pro Buslinie (32), nicht in Bezug auf Knoten. Die Last eines elektrischen Knotens kann weniger als betragen 1. Typische Datenraten können bis zu 35 Mbit/s über Entfernungen von 12 m erreichen, und 100 kbps über Entfernungen von 1200 m, ausreichend für Datenerfassungs- und Steuerungsanwendungen. RS-485-Geräteprotokolle basieren häufig auf Protokollen, die ursprünglich für RS-232 entwickelt wurden.
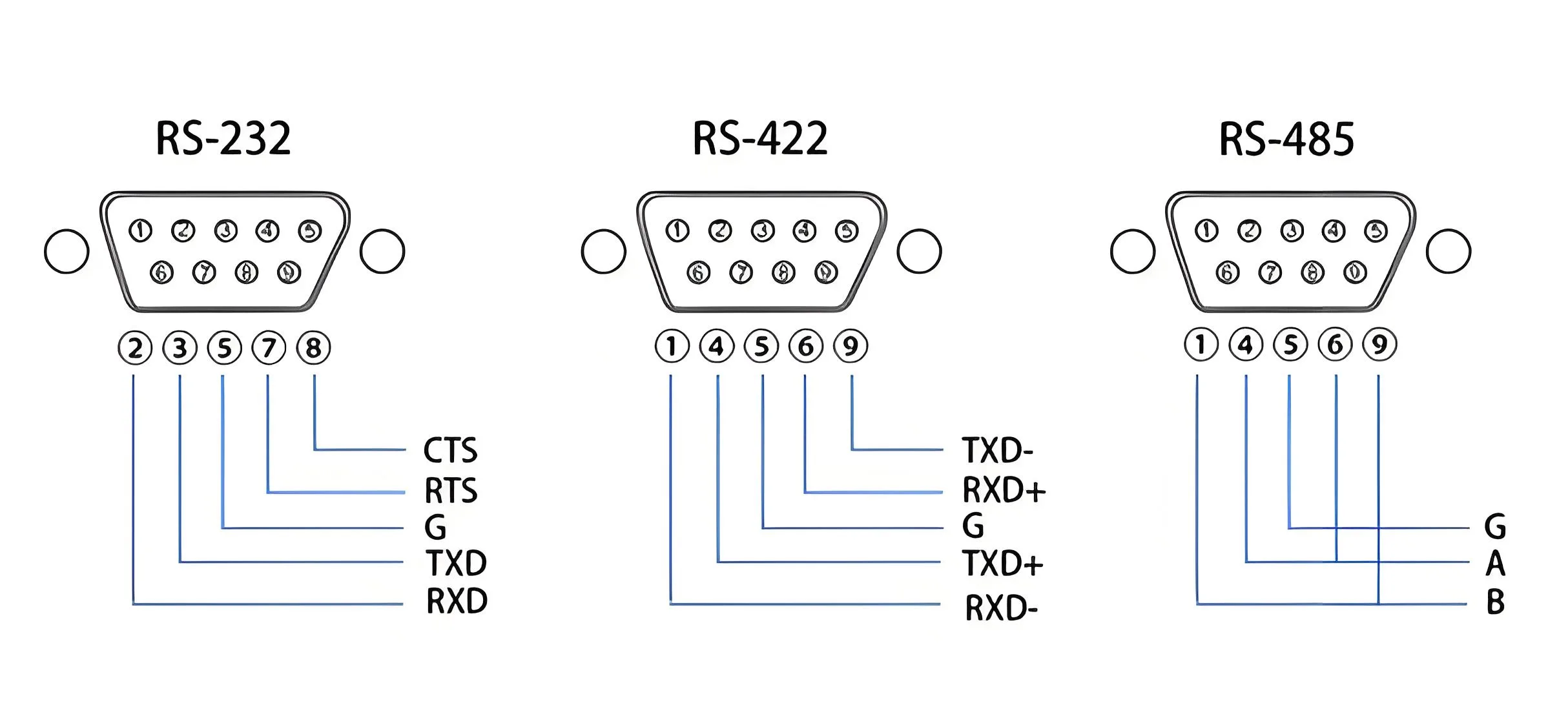
RS-Serie
Im Gegensatz, das Controller Area Network (DÜRFEN) definiert ein Kommunikationsprotokoll für verteilte Echtzeitsteuerung mit sehr hoher Sicherheit, speziell auf Automobil- und Industrieautomatisierungsanwendungen ausgerichtet. Die Datenraten reichen von 1 Mbit/s über Entfernungen von bis zu 40 m bis zu 50 kbit/s über Entfernungen von bis zu 1000 m. Die Adressierungsmethode basiert auf Nachrichten, und das Protokoll selbst begrenzt die Anzahl der Knoten nicht. CAN-Knoten unterstützen Hot-Plugging, Ermöglicht dynamische Änderungen der Anzahl der Netzwerkknoten.
Abschluss
Im Einfachen, kostengünstige Bussysteme im Vergleich zu LIN-Bussen und SensorPath, 1-Drahtsysteme bieten den größten Funktionsumfang und Netzwerktreiber für Slave-Geräte. I²C und SMBus erfordern Datenleitungen und Erdungen sowie Taktleitungen und VCC-Stromversorgungen, bieten aber viele Gerätefunktionen. SPI und MICROWIREs erfordern zusätzliche Chip-Select-Leitungen, bieten aber höhere Datenraten. Neben der Unterstützung der parasitären Stromversorgung und der Erkennung von Netzwerkknoten, Die 1-Wire-Schnittstelle und das Protokoll unterstützen Hot-Plugging, findet man normalerweise nur in Hochgeschwindigkeitssystemen, die Differenzsignalisierung und SMBus verwenden 2.0 kompatible Produkte. iButton® Produkte werden häufig als Hot-Plug-fähige 1-Wire-Geräte verwendet; Hot-Plugging ist ihr normaler Betriebsmodus. Diese Geräte haben sich bei Anwendungen wie globalen Identifikationsnummern als äußerst effektiv erwiesen, Identifizierung und Zertifizierung von Leiterplatten/Komponenten, Temperaturerfassung, und Betätigungsgeräte. Eine weitere erfolgreiche Anwendung der 1-Wire-Technologie umfasst sichere Speicher- und Challenge-Response-Mechanismen für eine kostengünstige Authentifizierung und Softwarecodeschutz.

Tolle Arbeit! Dies ist die Art von Informationen, die im Internet geteilt werden sollten. Schade, dass Google diesen Beitrag nicht höher positioniert hat! Kommen Sie vorbei und besuchen Sie meine Website . Danke =)