
Vous devez avoir vu diverses interfaces sur de nombreux circuits imprimés électroniques, comme gpio, I2C, IPS, UART, UTILISÉ, USB, etc.. Vous devez être curieux de savoir les principes de travail, objectifs, et différences entre ces interfaces sur les cartes de circuits imprimées. Aujourd'hui, Notre rédacteur a rendu visite aux collègues du département technique de la société UGPCB pour expliquer leur “vraie nature.”
Interfaces de communication
Différences simples
1) GPIO (Sortie d'entrée à usage général) est une entrée / sortie à usage général, port général, Extension de bus qui simplifie l'expansion des E / S à l'aide de la norme industrielle I2C, SMBUS™, ou spi™ interfaces. Lorsque les microcontrôleurs ou les chipsets manquent suffisamment de ports d'E / S, ou lorsque les systèmes nécessitent une communication ou un contrôle série à distance, Les produits GPIO peuvent fournir des fonctions de contrôle et de surveillance supplémentaires.
2) IPS (Interface périphérique en série) est un bus de série bidirectionnel synchrone à quatre fils standard. L'interface SPI est principalement utilisée dans EEPROM, ÉCLAIR, horloges en temps réel, Convertisseurs d'annonces, et entre les processeurs de signaux numériques et les décodeurs de signaux numériques. SPI est une grande vitesse, duplex complet, Bus de communication synchrone qui n'occupe que quatre broches sur la puce, Économie d'épargne Counts et espace de mise en page PCB. En raison de ses caractéristiques simples et faciles à utiliser, De plus en plus de puces intègrent ce protocole de communication.
3) je2C (Bus inter-IC) est un bus en série à deux fils développé par Philips pour connecter les microcontrôleurs et leurs appareils périphériques. Il s'agit d'une norme de bus largement adoptée dans le domaine du contrôle de la communication microélectronique. Il présente les avantages de moins de lignes d'interface, Méthodes de contrôle simples, Formulaires d'emballage de petits appareils, et des taux de communication plus élevés.
4) UART (Émetteur récepteur asynchrone universel) est un récepteur / émetteur asynchrone universel.
5) Émetteur récepteur asynchrone synchrone universel USART;
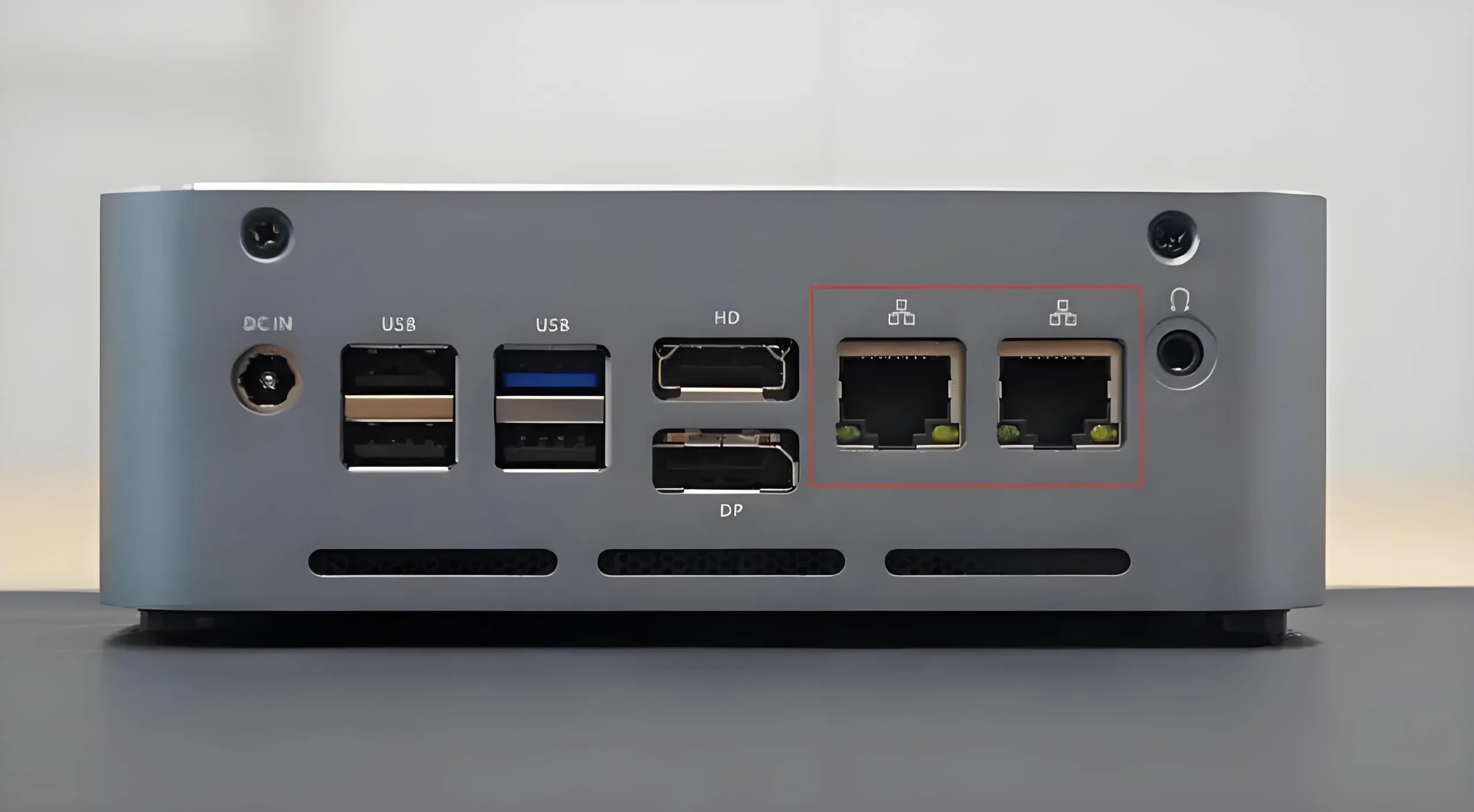
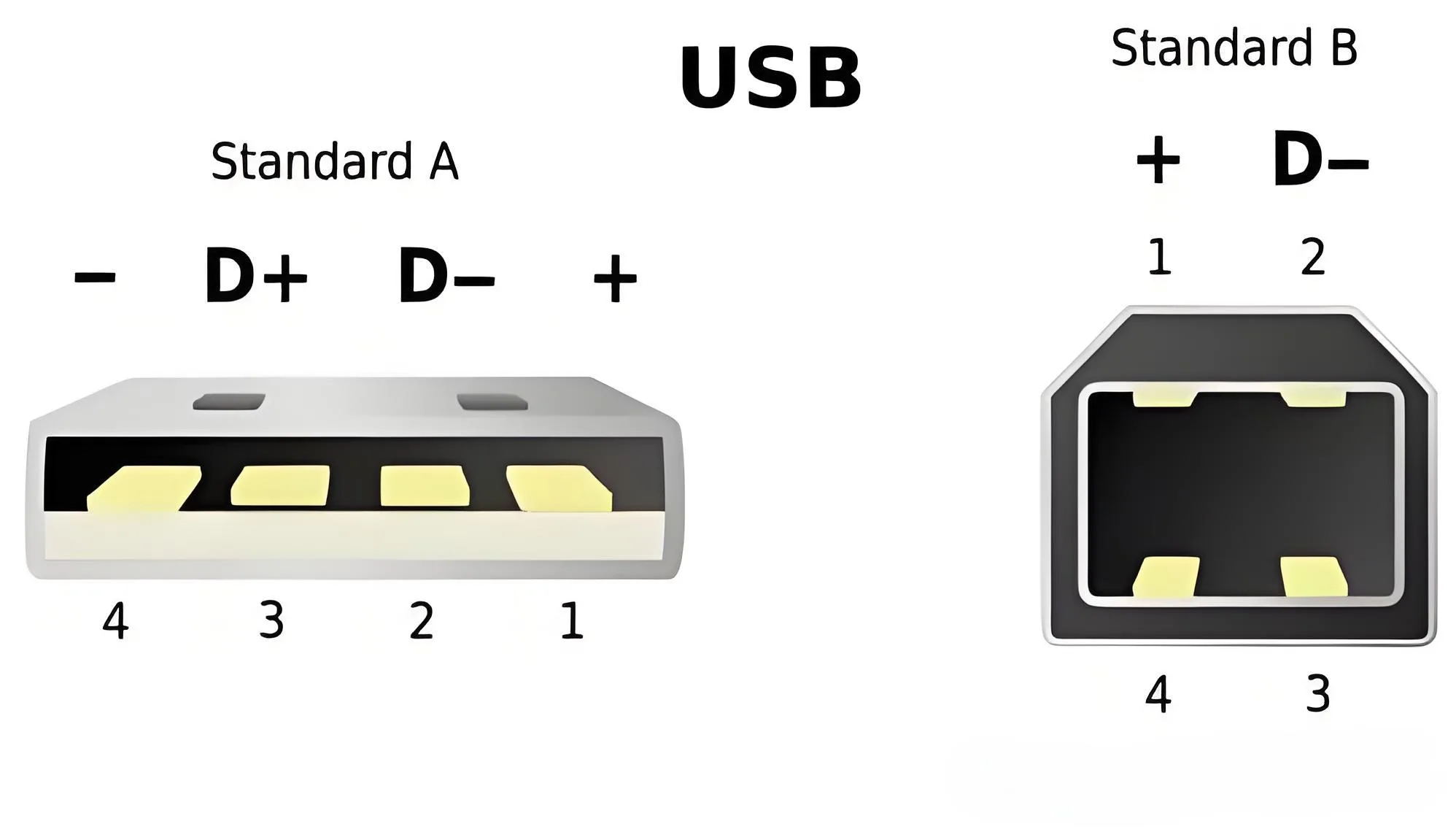
6) Bus de série universel USB (Bus de série universel)
7) Can Fieldbus
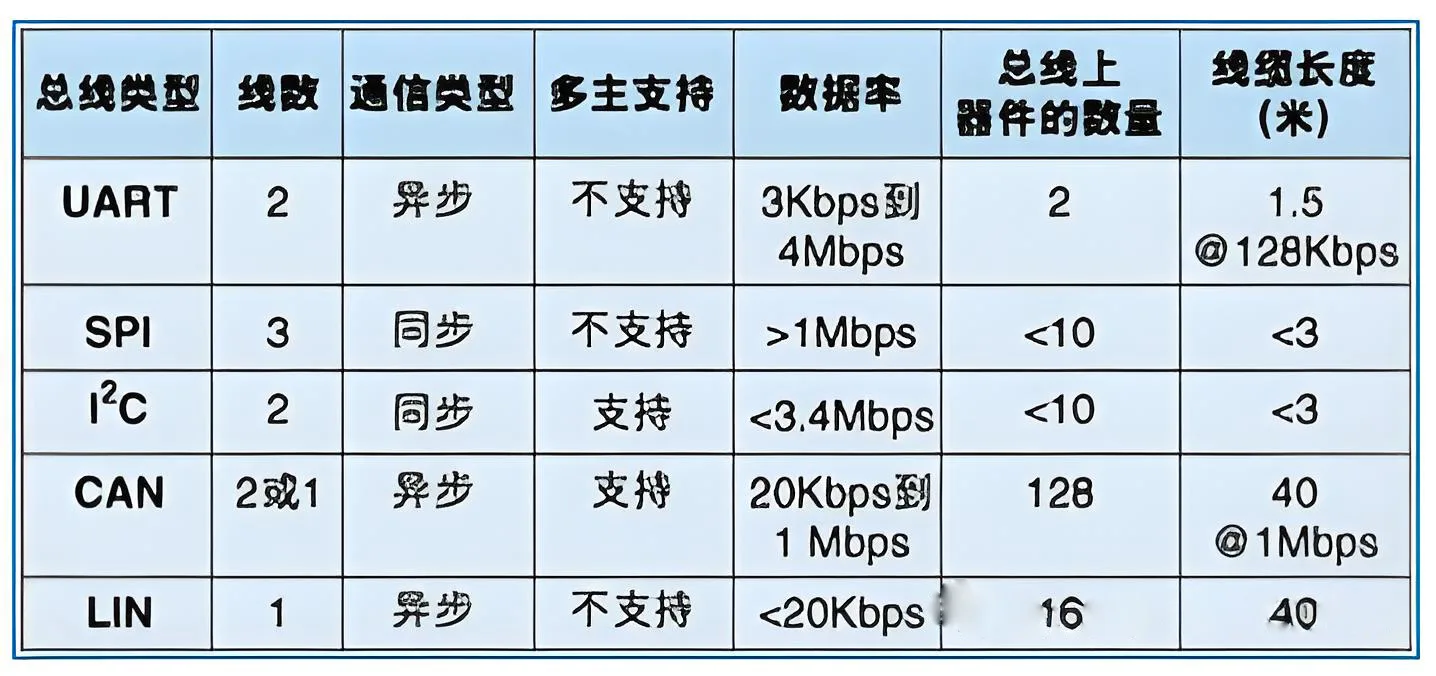
Tableau des paramètres de transmission d'interface
Composition des lignes de données de transmission
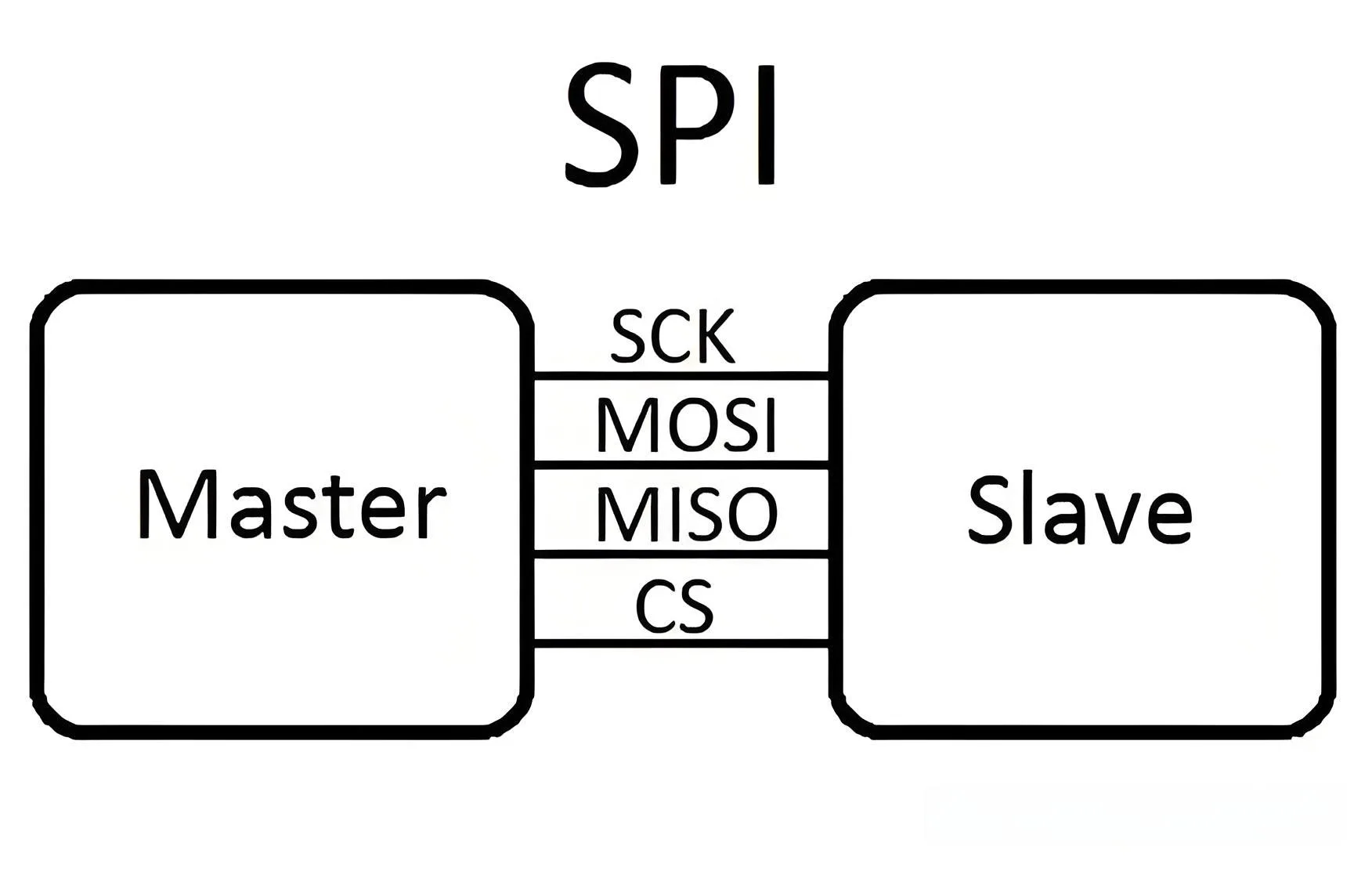
Le bus SPI se compose de trois lignes de signal horloge série (SCLK), Sortie de données série (Sdo), et entrée de données série (SDI). Le bus SPI peut connecter plusieurs appareils SPI. Le dispositif SPI fournissant l'horloge SPI est le maître ou l'appareil principal (Maître), tandis que d'autres appareils sont des esclaves ou des appareils esclaves (Esclave). Les appareils maître et esclaves peuvent obtenir une communication duplex complète. Lorsqu'il y a plusieurs appareils d'esclaves, Une ligne de sélection d'esclaves supplémentaire peut être ajoutée.
Si simulant le bus SPI avec les ports IO généraux, il est nécessaire d'avoir un port de sortie (Sdo), un port d'entrée (SDI), et selon le type de périphérique implémenté, un autre port si implémente des appareils maître et esclaves, nécessitant des ports d'entrée et de sortie; Si vous n'implémentez que des appareils maîtres, Un port de sortie est suffisant; Si vous n'implémentez que des appareils esclaves, Un port d'entrée est nécessaire.
Le bus I2C est un double sens, deux fils (SCL, SDA), en série, Norme d'interface multi-maître avec un mécanisme d'arbitrage de bus, Le rendre très adapté à la gamme à proximité, Communications de données peu fréquentes entre les appareils. Dans son système de protocole, Lors de la transmission de données, L'adresse de l'appareil de destination est incluse, activer le réseau de périphériques.
Si simulant le bus I2C avec des ports IO généraux pour une transmission bidirectionnelle, un port d'entrée / sortie (SDA) est nécessaire, et un autre port de sortie (SCL) est requis. (Notez que ma compréhension de I2C est relativement limitée, Cette description peut donc être incomplète.)
Le bus UART est un port série asynchrone, il a donc généralement une structure beaucoup plus complexe que les deux ports série synchrones précédents (comme introduit dans les livres de microcontrôleur, Bien que ce ne soit pas considéré comme complexe). Il se compose généralement d'un générateur de taux en bauds (Le taux de bauds généré est égal à 16 fois le taux de bauds de transmission), un récepteur UART, et un émetteur UART, avec deux fils en matériel, un pour l'envoi et un pour avoir reçu.
Clairement, Si simulez le bus UART avec des ports IO généraux, Un port d'entrée et un port de sortie sont requis.
Du deuxième point, Il est évident que SPI et UART peuvent atteindre le duplex complet, Mais i2c ne peut pas.
Différences de protocole de communication
IPS
IPS
SPI est un protocole qui permet à un dispositif maître d'initier une communication synchrone avec un appareil esclave, terminant ainsi l'échange de données. Cette méthode de communication a l'avantage d'occuper moins de ports; en général, Quatre suffisent pour la communication de base. En même temps, La vitesse de transmission est également très élevée. En général, il nécessite que le dispositif maître ait un contrôleur SPI (Mais il peut également être simulé) Pour communiquer avec des puces à base de SPI.
Le principe de communication de SPI est très simple; il nécessite au moins quatre fils, Mais trois peuvent aussi suffire. Ils sont communs à tous les appareils SPI SDI (entrée de données), Sdo (sortie de données), SCK (horloge), CS (Sélection de puce). Le CS contrôle si la puce est sélectionnée, Les opérations de sens sur cette puce ne sont efficaces que lorsque le signal de sélection de puce est à un signal d'activation prédéterminé (niveau élevé ou faible niveau). Cela permet de connecter plusieurs appareils SPI dans le même bus.
Viennent ensuite les trois lignes responsables de la communication. La communication est terminée par échange de données. Ici, Il est important de savoir que SPI est un protocole de communication série, signifiant que les données sont transmises petit à petit. C'est pourquoi la ligne d'horloge SCK existe. La SCK fournit des impulsions d'horloge, et SDI, SDO Terminez la transmission de données basée sur ces impulsions. La sortie de données se produit via la ligne SDO; Les données changent sur le bord montant ou le bord de la descente de l'horloge et sont lus à l'immédiat suivant la chute ou le bord montant. Un morceau de transmission de données est terminé de cette manière. L'entrée suit le même principe. Ainsi, Au moins huit changements dans le signal d'horloge (Un cycle de haut en bas constitue un changement) permettre la transmission de 8 bits de données.
Il convient de noter que la ligne de signal SCK est contrôlée uniquement par le dispositif maître, et les dispositifs d'esclaves ne peuvent pas contrôler la ligne de signal. De la même manière, Dans un appareil basé sur SPI, Il doit y avoir au moins un appareil maître.
Cette caractéristique de transmission a un avantage sur les communications en série typiques contrairement à la communication série conventionnelle, qui transmet au moins 8 Bits de données en continu, SPI permet de transmettre les données, et même permet une pause car la ligne d'horloge SCK est contrôlée par le périphérique maître. Quand il n'y a pas de transition d'horloge, Le dispositif esclave ne collecte ni ne transmet des données. Autrement dit, Le dispositif maître peut contrôler la communication par le contrôle de la ligne d'horloge SCK.
SPI est également un protocole d'échange de données car les lignes d'entrée de données SPI et de sortie sont indépendantes, Ils permettent l'achèvement simultané de l'entrée et de la sortie des données.
Différents appareils SPI ont des implémentations différentes, principalement en termes de changement de données et est collecté, avec différentes définitions de collecte sur le bord montant ou le bord de la descente du signal de l'horloge. Pour des détails spécifiques, Veuillez vous référer à la documentation des appareils pertinents.
je2C
Seules deux lignes de bus sont requises une ligne de données série SDA et une ligne d'horloge série SCL.
Chaque appareil connecté au bus peut être adressé avec une adresse unique et une simple relation maître-esclave par logiciel. L'hôte peut agir en tant que maître émetteur ou récepteur.
C'est un véritable bus multi-maître; Si deux maîtres ou plus lancent simultanément le transfert de données, La détection et l'arbitrage des conflits empêchent la corruption des données.
Les taux de transfert de données bidirectionnels en série 8 bits peuvent atteindre jusqu'à 100 kbit / s en mode standard, 400kbit / s en mode rapide, et 3,4 Mbit / s en mode haute vitesse.
Les filtres sur puce suppriment les pépins de la ligne de données du bus pour assurer l'intégrité des données.
Le nombre de circuits intégrés connectés au même bus n'est limité que par la capacité maximale de bus de 400pf.
UART
Le bus UART est un port série asynchrone, donc sa structure est généralement beaucoup plus complexe que les deux précédents ports série synchrones. Il se compose généralement d'un générateur de taux en bauds (qui génère un taux de bauds égal à 16 fois le taux de bauds de transmission), un récepteur UART, et un émetteur UART, avec deux fils en matériel, un pour l'envoi et un pour avoir reçu.
L'UART est couramment utilisé pour contrôler les puces informatiques pour les appareils série. Un point à noter est qu'il fournit une interface de l'équipement de terminal de données RS-232C, Permettre aux ordinateurs de communiquer avec des modems ou d'autres dispositifs série à l'aide de l'interface RS-232C.
UART signifie récepteur / émetteur asynchrone universel (port de communication série asynchrone). Il comprend des normes et des spécifications pour les interfaces telles que RS232, Rs499, RS423, RS422, et Rs485, faire de l'UART un terme général pour les ports de communication série asynchrones. Rs232, Rs499, RS423, RS422, et RS485 sont des normes et des spécifications d'interface pour divers ports de communication en série asynchrones, Définition des caractéristiques électriques, taux de transmission, Caractéristiques de connexion, et les propriétés mécaniques des interfaces. Ils appartiennent à la couche physique (la couche la plus basse) concept dans le réseau de communication et ne sont pas directement liés aux protocoles de communication. Les protocoles de communication appartiennent à la couche de liaison de données (la couche supérieure suivante) concept dans le réseau de communication. Le port com est une abréviation du port de communication série asynchrone sur un PC (ordinateur personnel). Pour des raisons historiques, L'interface externe PC d'IBM a été configurée comme RS232, Devenir la norme de facto dans l'industrie PC. Ainsi, Les ports com sur les PC modernes sont tous RS232. Si plusieurs ports de communication série asynchrones sont disponibles, Ils sont nommés com1, Com2, etc..
Il est clair que SPI et UART peuvent obtenir une communication complète, Mais i2c ne peut pas.
Récepteur et émetteur asynchrones synchrones universels usart. (La différence par rapport à l'UART est évidente.)
Récepteur et émetteur asynchrones universels UART;
Récepteur et émetteur asynchrones synchrones universels usart. En général, en microcontrôleurs, Les interfaces nommées UART sont utilisées uniquement pour la communication série asynchrone, tandis que ceux nommés USART peuvent être utilisés pour la communication série synchrone et asynchrone.
USB
USB signifie Universal Serial Bus, une norme de bus externe pour connecter et communiquer entre un ordinateur et des appareils externes, Appliqué dans le domaine PC. USB prend en charge les fonctions plug-and-play et à chaud. L'USB a été proposé par une coalition dont Intel, Compaq, Ibm, et Microsoft à la fin de 1994.
USB
Les caractéristiques électriques de l'USB et les caractéristiques de transmission comprennent des émetteurs-récepteurs USB à grande vitesse comme Philips’ 82C251, TI's SN65 / 75LBC031, CF150 de Bosch, C250, et UC5350 d'Intersil; Les émetteurs-récepteurs USB à basse vitesse comprennent Philips 82C252, TJA1053, Siemens tle 6252g; Les émetteurs-récepteurs USB à fil unique incluent Philips Au5790, Infineon tle 6255, Delphi DK166153.
PEUT
Quand le bus est inactif, Tout nœud peut démarrer la transmission de données. Si deux nœuds ou plus commencent la transmission simultanément, L'arbitrage bits basé sur l'identifiant résout les conflits d'accès. Can est un bus de type diffusé où tous les nœuds reçoivent des données du bus, et un mécanisme de filtrage matériel détermine si le message est fourni au nœud.
Il existe quatre types de cadres de messages, cadre éloigné, cadre d'erreur, et cadre de surcharge.
Les contrôleurs de base peuvent être rentables avec des tampons de messages limités pour l'envoi / réception et les mécanismes de filtrage des messages de base. Les contrôleurs complets de canettes offrent des coûts et des performances plus élevés avec des tampons capables de manipuler 8 ou plus de messages pour l'envoi et la réception. Les contrôleurs standard peuvent gérer les messages avec des identificateurs 11 bits, tandis que les contrôleurs étendus peuvent gérer les messages d'identifiant 11 bits et 29 bits. Déclenché dans le temps peut (Ttcan) Les contrôleurs calendaient des messages en fonction de l'heure et des événements, Améliorer les performances globales et la prévisibilité du comportement du réseau CAN.
Les octets de données sont transmis à partir du bit le plus significatif. Un octet de données 8 bits peut être transmis en une seule opération d'envoi, avec la vitesse maximale de la boîte de bus étant de 1 Mbps.
La plupart des microcontrôleurs peuvent exiger qu'un émetteur-récepteur externe se connecte au bus physique. Le marché propose des émetteurs-récepteurs à grande vitesse comme Philips’ 82C251, TI's SN65 / 75LBC031, CF150 de Bosch, C250, et UC5350 d'Intersil; et émetteurs-récepteurs à basse vitesse comme Philips 82C252, TJA1053, et Siemens tle 6252G.
Choisir le bus en série
Microcontrôleurs (µC) sont au cœur des produits électroniques avancés d'aujourd'hui, nécessitant une communication avec un ou plusieurs dispositifs périphériques. Traditionnellement, µC Les périphériques ont été connectés via des données à cartographie et des bus d'adresse. Ce type d'interface nécessite un nombre minimum d'épingles (à l'exclusion de la puissance et du sol) 8 (données) + 1 (R // w) + 1 (/CS) + n lignes d'adresse [n = log2(Registre interne ou comptage d'octets de mémoire)]. Par exemple, communiquer avec un périphérique de 16 octets nécessite 8 + 1 + 1 + 4 = 14 épingles. Cette interface offre un accès rapide mais augmente la taille du package et le coût total en raison du plus grand nombre d'épingles. Pour réduire les coûts et les tailles d'emballage, Les interfaces en série sont des alternatives idéales.
La sélection d'un bus en série n'est pas facile. En plus de considérer les débits de données, Ordre de transmission de bits de données (Bit le plus important en premier ou en dernier), et tension, Les concepteurs doivent considérer comment sélectionner un périphérique (via la puce matérielle Sélectionnez des entrées ou du protocole logiciel), Comment les périphériques se synchronisent avec µC (Utilisation d'une ligne d'horloge matérielle ou d'informations d'horloge intégrées dans le flux de données), si les données sont transmises sur une seule ligne (basculer entre “haut” et “faible”) ou sur une paire différentielle (Deux lignes commutant simultanément dans des directions opposées), Et si les lignes de communication utilisent une résistance appariée aux deux extrémités (généralement pour la signalisation différentielle), incomparable, ou assorti à une extrémité (Commun pour les bus uniques). Tableau 1 montre les différences entre les divers systèmes de bus communs sous forme de matrice. Seulement quatre des 16 Les combinaisons possibles sont bien connues.
Outre ces caractéristiques, Les applications spécifiques peuvent avoir des exigences supplémentaires telles que les méthodes d'alimentation, isolement, suppression du bruit, ΜC maximum (hôte) périphérique (esclave) Distance de transmission, et méthodes de connexion par câble (type de bus, type d'étoile, Protection de polarité inversée, etc.). Des applications comme l'automatisation du bâtiment, contrôle industriel, lecture du compteur, etc., ont établi des normes pour de telles exigences.
I²C / SMBUS VS. 1-Bus
Si l'application peut fournir une ligne d'horloge, La sélection de bus peut s'étendre aux appareils I²C / SMBUS. Selon la spécification SMBUS, Il peut être considéré comme un dérivé de la spécification de bus de 100 kbps I²C avec des fonctions de délai d'attente supplémentaires. Dans les cas où un nœud perd la synchronisation avec le maître de bus, La fonction de délai d'expiration empêche le verrouillage du bus, tandis que le système I²C nécessite une réinitialisation de mise sous tension pour se remettre de ces conditions de défaut. Le système à 1 fil réinitialise / détecte la présence pendant la phase d'initialisation de l'interface de communication.
Outre la ligne d'horloge, I²C / SMBUS fournit un bit de reconnaissance pour chaque octet transmis dans le bus, réduire les débits de données efficaces par 12%. Le processus de communication commence par une condition de départ suivie de l'adresse du périphérique esclave et d'un bit de direction de données (lire / écrire), se terminant par une condition d'arrêt. Pour le système à 1 fil, Les exigences de la couche de réseau doivent être satisfaites en premier (c'est-à-dire, Sélection d'un périphérique spécifique via des commandes ROM de recherche ou de diffusion), puis envoyez des codes de commande liés à des appareils spécifiques affectant la direction de transmission des données (lire / écrire).
Un problème notable avec les systèmes de bus I²C et SMBUS d'origine est leur espace d'adressage limité à 7 bits. Avec plus de 127 différents types d'appareils disponibles, Il est impossible de déduire les fonctionnalités de l'appareil de l'adresse esclave seule. En plus, De nombreux appareils I²C permettent aux utilisateurs de définir arbitrairement un ou plusieurs bits d'adresse pour joindre plusieurs appareils identiques dans le bus, Réduire davantage l'espace d'adressage disponible. La résolution des conflits aborde implique la segmentation du système de bus en plusieurs segments qui peuvent être activés sous le contrôle du logiciel à un moment donné. Cela nécessite du matériel supplémentaire et complique le micrologiciel d'application. Les systèmes I²C manquent de capacités de découverte de nœuds de réseau ou d'énumération, Rendre difficile de gérer les réseaux avec des dénombrements de nœuds en changement dynamique. Ce problème est résolu par le protocole de résolution d'adresse dans la version de spécification SMBUS 2.013, bien que les appareils SMBU pris en charge soient rares.
Interface SPI et micro-ondes
SPI et microwire (Un sous-ensemble de SPI) nécessitent une ligne de sélection de puces supplémentaire pour chaque appareil esclave. En raison du signal de sélection de puce, Le protocole SPI définit uniquement les commandes de lecture / écriture pour les adresses mémoire et les registres d'état sans fournir une fonctionnalité de reconnaissance. Typiquement, Les périphériques SPI utilisent des broches séparées pour l'entrée et la sortie des données. Étant donné que la sortie de données est tri-étatique sauf pendant les opérations de lecture, Les deux broches de données peuvent être connectées ensemble pour former une seule ligne de données bidirectionnelle. Les bus SPI sont choisis lorsque d'autres systèmes de bus ne fournissent pas les fonctionnalités nécessaires ou lorsque des taux de transfert de données plus élevés sont nécessaires, Soutenir jusqu'à 2 Mbps ou des taux plus élevés. Cependant, La génération de signaux CS pour aborder des appareils spécifiques est un inconvénient de SPI et de micro-ondes. Comme i²c, Ils ne prennent pas en charge la découverte de nœuds. L'hôte ne peut pas déduire les fonctionnalités de l'appareil à partir d'adresses d'esclave logiques, Rendant difficile la gestion des réseaux avec des nœuds en changement dynamique.
RS-485, LVDS, PEUT, USB 2.0, et Firewire
Ces normes illustrent les caractéristiques de transmission différentielle. Le plus rapide parmi ces systèmes de bus est Firewire et USB 2.0, qui utilisent des connexions électriques point à point. Avec des nœuds ou des hubs avancés, Ils peuvent former des bus virtuels avec des topologies d'arbres, Envoi de paquets de données de la source au point final (USB) ou peer-to-peer (Firewire), avec des débits d'éclatement jusqu'à 480 Mbps (USB 2.0) ou 1600 Mbps (Firewire). Les paquets de données de taille limitée et les mécanismes de communication de réception / tampon / renvoyer augmentent le temps de transmission, réduisant ainsi le débit de données efficace. La topologie et le protocole de l'USB permettent 126 nœuds, tandis que Firewire prend en charge 63 nœuds avec une distance maximale de nœud à nœud de 4,5 m en utilisant des câbles passifs. Conçu pour les périphériques PC, multimédia, contrôle industriel, et applications aéronautiques (Seulement Firewire), Les appareils USB et Firewire prennent en charge la bouchée à chaud. Cette fonctionnalité permet des modifications dynamiques du nombre de nœuds de réseau.
LVDS, RS-485, et peut implémenter des topologies de bus reliant plusieurs hôtes. Signalisation différentielle à basse tension (LVDS) offre la vitesse la plus élevée parmi ces normes, capable de fonctionner à 100 Mbps sur des distances jusqu'à 10m. Le débit de données et le débit réels dépendent de la taille du réseau. La norme électrique LVDS est conçue pour les applications de fond de panier et prend en charge la poigmentation à chaud mais n'inclut aucun protocole.
Le RS-485 ne définit également que les paramètres électriques, spécifiant la capacité de charge et les charges maximales par ligne de bus (32), pas en termes de nœuds. La charge d'un nœud électrique peut être inférieure à 1. Les débits de données typiques peuvent atteindre jusqu'à 35 Mbps sur des distances de 12 m, et 100 kbps sur des distances de 1200m, suffisant pour les applications d'acquisition et de contrôle des données. Les protocoles de périphériques RS-485 sont souvent basés sur des protocoles conçus à l'origine pour RS-232.
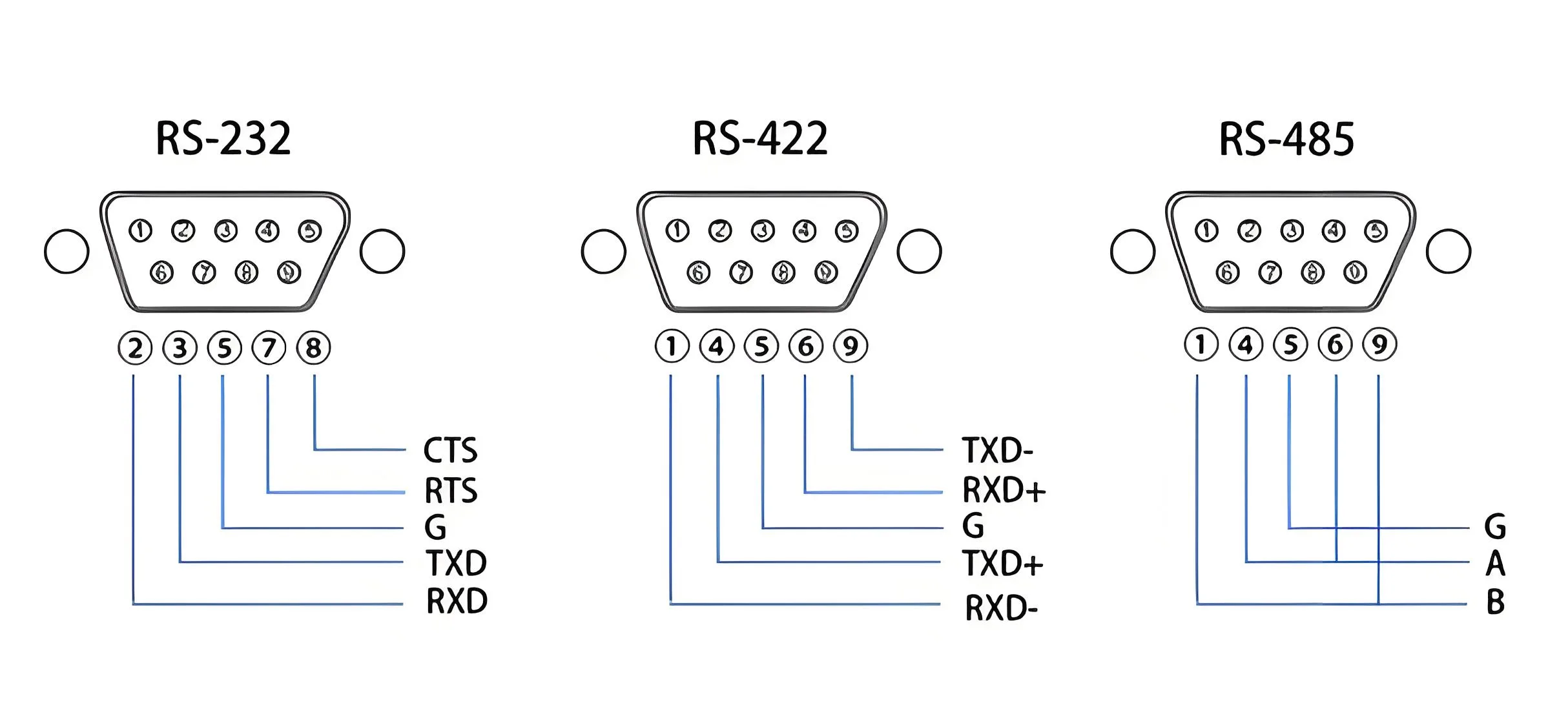
Série RS
En revanche, le réseau de zone de contrôleur (PEUT) Définit un protocole de communication pour un contrôle en temps réel distribué avec une très haute sécurité, Spécifiquement destiné aux applications d'automatisation automobile et industrielle. Les débits de données varient de 1 Mbps sur des distances allant jusqu'à 40 m à 50 kbps sur des distances allant jusqu'à 1000 m. La méthode d'adressage est basée sur des messages, Et le protocole lui-même ne limite pas le nombre de nœuds. Les nœuds peuvent prendre en charge la bouchée à chaud, permettant des modifications dynamiques du nombre de nœuds de réseau.
Conclusion
En simple, Systèmes de bus à faible coût par rapport aux bus Lin et à SensorPath, 1-Les systèmes de câbles offrent la plus large gamme de fonctions et de pilotes de réseau pour les appareils esclaves. I²C et SMBUS nécessitent des lignes de données et des terrains ainsi que des lignes d'horloge et des alimentations VCC, mais offrent de nombreuses fonctionnalités d'appareil. SPI et les micro-ondes nécessitent des lignes de sélection de puces supplémentaires mais fournissent des débits de données plus élevés. En plus de prendre en charge l'alimentation parasitaire et la découverte de nœuds de réseau, L'interface à 1 fil et le protocole prennent en charge la bouchée à chaud, généralement trouvé uniquement dans des systèmes à grande vitesse en utilisant la signalisation différentielle et les SMBU 2.0 produits compatibles. ibutton® Les produits sont largement utilisés comme dispositifs à 1 câble à chaud; La bouchée à chaud est leur mode de fonctionnement normal. Ces appareils se sont révélés très efficaces dans des applications telles que les numéros d'identification mondiaux, Circuit Board / Identification et certification des composants, détection de température, et dispositifs d'actionnement. Une autre application réussie de la technologie à 1 fil comprend des mécanismes de stockage et de réponse au défi sécurisé pour obtenir une authentification à faible coût et une protection du code logiciel.
