
많은 전자 장치 회로 기판의 다양한 인터페이스를 보셨을 것입니다., GPIO와 같은, I2C, SPI, UART, 사용된, USB, 등. 작동원리가 궁금하실텐데요, 목적, 회로 기판의 인터페이스 간의 차이점. 오늘, 우리 편집자는 UGPCB 회사의 기술 부서 동료들을 방문하여 그들의 이야기를 설명했습니다. “본질.”
통신 인터페이스
단순한 차이점
1) GPIO (범용 입력 출력) 범용 입력/출력입니다., 일반항, 산업 표준 I2C를 사용하여 I/O 확장을 단순화하는 버스 확장기, SMBus™, 또는 SPI™ 인터페이스. 마이크로컨트롤러나 칩셋에 I/O 포트가 부족한 경우, 또는 시스템에 원격 직렬 통신이나 제어가 필요한 경우, GPIO 제품은 추가 제어 및 모니터링 기능을 제공할 수 있습니다..
2) SPI (직렬 주변기기 인터페이스) 표준 4선 동기식 양방향 직렬 버스입니다.. SPI 인터페이스는 주로 EEPROM에 사용됩니다., 플래시, 실시간 시계, AD 변환기, 디지털 신호 프로세서와 디지털 신호 디코더 사이. SPI는 고속이다., 전이중, 칩에서 4개의 핀만 차지하는 동기식 통신 버스, 핀 수 및 PCB 레이아웃 공간 절약. 간단하고 사용하기 쉬운 특성으로 인해, 점점 더 많은 칩이 이 통신 프로토콜을 통합하고 있습니다..
3) 나2기음 (인터IC 버스) 마이크로컨트롤러와 주변 장치를 연결하기 위해 PHILIPS가 개발한 2선 직렬 버스입니다.. 마이크로 전자 통신 제어 분야에서 널리 채택되는 버스 표준입니다.. 인터페이스 라인 수가 적다는 장점이 있습니다., 간단한 제어 방법, 소형 장치 포장 형태, 더 높은 통신 속도.
4) UART (범용 비동기 수신기 송신기) 범용 비동기식 수신기/송신기 장치입니다..
5) USART 범용 동기 비동기 수신기 송신기;
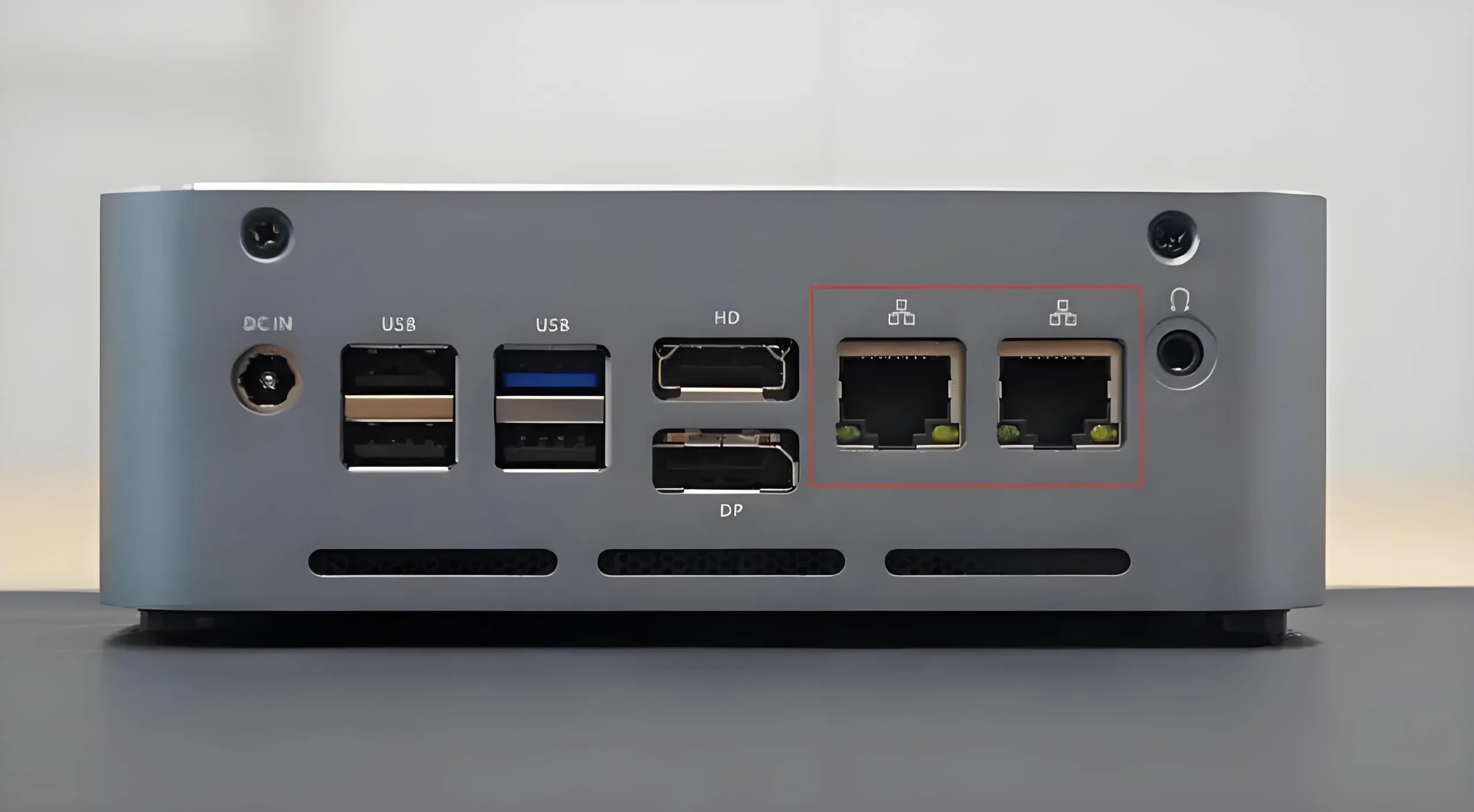
6) USB 범용 직렬 버스 (범용 직렬 버스)
7) CAN 필드버스
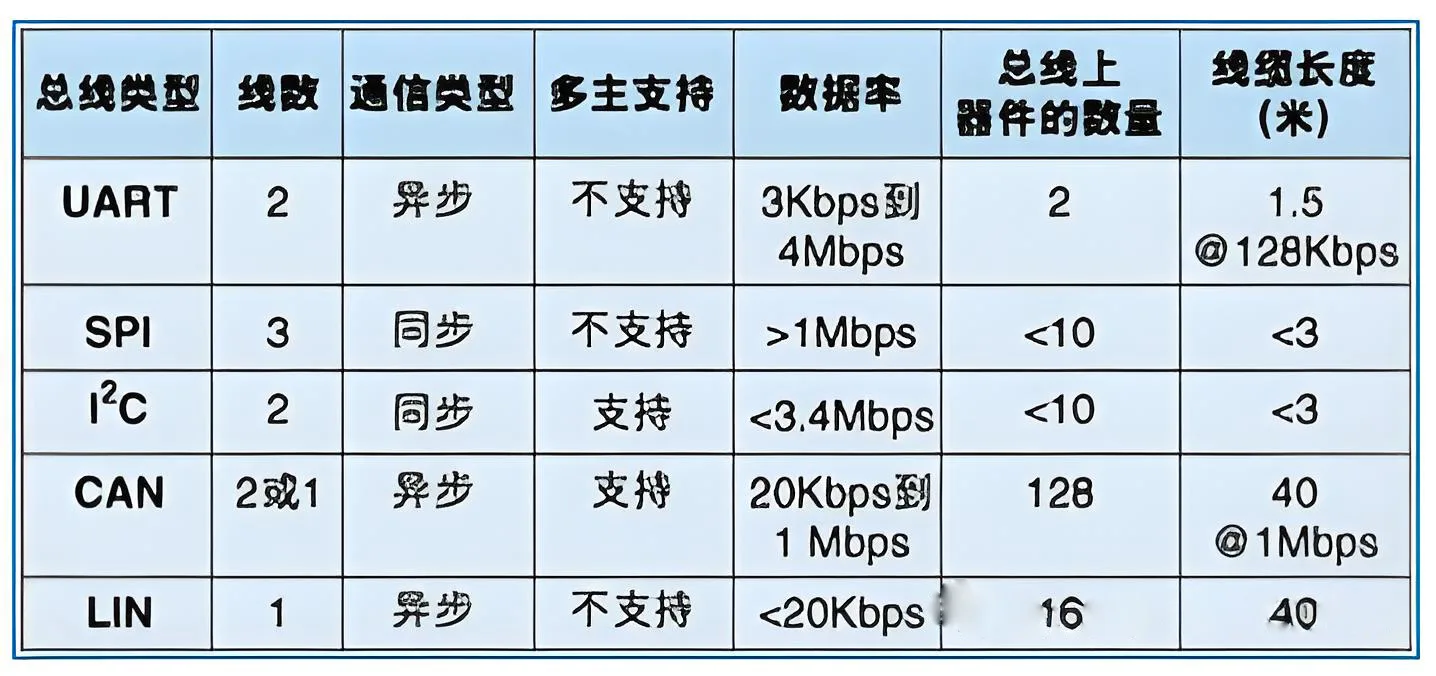
인터페이스 전송 매개변수 표
전송 데이터 라인의 구성
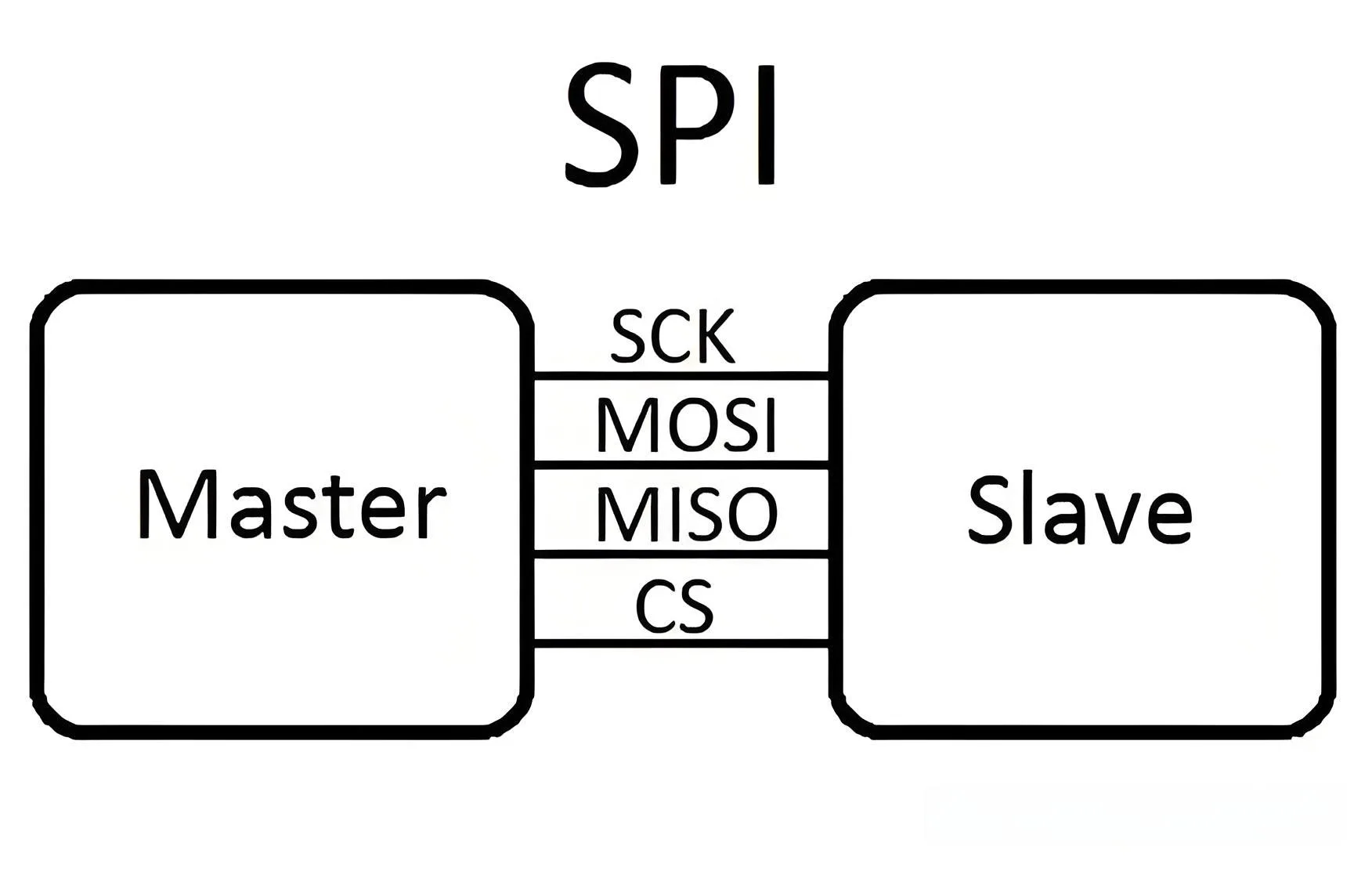
SPI 버스는 3개의 신호 라인으로 구성됩니다. 직렬 클록 (SCLK), 직렬 데이터 출력 (SDO), 및 직렬 데이터 입력 (SDI). SPI 버스는 여러 SPI 장치를 연결할 수 있습니다. SPI 클록을 제공하는 SPI 장치는 마스터 또는 기본 장치입니다. (주인), 다른 장치는 슬레이브 또는 슬레이브 장치입니다. (노예). 마스터 및 슬레이브 장치는 전이중 통신을 달성할 수 있습니다.. 슬레이브 장치가 여러 개인 경우, 추가 슬레이브 선택 라인을 추가할 수 있습니다..
일반 IO 포트로 SPI 버스를 시뮬레이션하는 경우, 하나의 출력 포트가 필요합니다. (SDO), 입력 포트 1개 (SDI), 구현된 장치 유형에 따라, 마스터 및 슬레이브 장치를 구현하는 경우 다른 포트, 입력 및 출력 포트가 모두 필요함; 마스터 장치만 구현하는 경우, 출력 포트로 충분합니다; 슬레이브 장치만 구현하는 경우, 입력 포트가 필요합니다.
I2C 버스는 양방향 버스입니다., 2선식 (SCL, SDA), 연속물, 버스 중재 메커니즘을 갖춘 다중 마스터 인터페이스 표준, 근거리 작업에 매우 적합합니다., 장치 간 데이터 통신이 드물다. 프로토콜 시스템에서, 데이터를 전송할 때, 대상 장치의 주소가 포함됩니다., 장치 네트워킹 활성화.
양방향 전송을 위해 일반 IO 포트를 사용하여 I2C 버스를 시뮬레이션하는 경우, 입력/출력 포트 1개 (SDA) 필요하다, 그리고 또 다른 출력 포트 (SCL) 필수. (참고 I2C에 대한 나의 이해는 상대적으로 제한적입니다., 따라서 이 설명은 불완전할 수 있습니다.)
UART 버스는 비동기 직렬 포트입니다., 따라서 일반적으로 이전 두 개의 동기식 직렬 포트보다 훨씬 더 복잡한 구조를 갖습니다. (마이크로컨트롤러 책에 소개된 대로, 복잡하다고 생각되지는 않지만). 일반적으로 전송 속도 생성기로 구성됩니다. (생성된 전송 속도는 다음과 같습니다. 16 전송 전송 속도의 배), UART 수신기, UART 송신기, 하드웨어에 두 개의 전선이 있음, 하나는 송신용, 하나는 수신용.
분명히, 일반 IO 포트로 UART 버스를 시뮬레이션하는 경우, 하나의 입력 포트와 하나의 출력 포트가 필요합니다..
두 번째 지점부터, SPI와 UART가 전이중을 달성할 수 있다는 것은 명백합니다., 하지만 I2C는 할 수 없습니다.
통신 프로토콜 차이점
SPI
SPI
SPI는 마스터 장치가 슬레이브 장치와의 동기 통신을 시작할 수 있도록 하는 프로토콜입니다., 이로써 데이터 교환이 완료됩니다.. 이 통신 방식은 더 적은 포트를 차지한다는 장점이 있습니다.; 일반적으로, 기본적인 의사소통에는 4개면 충분합니다. 동시에, 전송 속도도 매우 빠르다. 일반적으로, 마스터 장치에 SPI 컨트롤러가 필요합니다. (하지만 시뮬레이션도 가능합니다) SPI 기반 칩과 통신하기 위해.
SPI의 통신 원리는 매우 간단합니다.; 적어도 4개의 전선이 필요합니다, 하지만 3개면 충분할 수도 있어요. 이는 모든 SPI 기반 장치 SDI에 공통됩니다. (데이터 입력), SDO (데이터 출력), SCK (시계), CS (칩 선택). CS는 칩 선택 여부를 제어합니다., 즉, 이 칩에 대한 작업은 칩 선택 신호가 미리 결정된 활성화 신호에 있을 때만 유효합니다. (높은 수준이든 낮은 수준이든). 이를 통해 여러 SPI 장치를 동일한 버스에 연결할 수 있습니다..
다음은 통신을 담당하는 세 줄입니다.. 데이터 교환을 통해 통신이 완료됩니다.. 여기, SPI가 직렬 통신 프로토콜이라는 것을 아는 것이 중요합니다, 데이터가 비트 단위로 전송된다는 의미. 이것이 SCK 클럭 라인이 존재하는 이유입니다.. SCK는 클록 펄스를 제공합니다., 그리고 SDI, 이러한 펄스를 기반으로 SDO 전체 데이터 전송. 데이터 출력은 SDO 라인을 통해 발생합니다.; 데이터는 클럭의 상승 에지 또는 하강 에지에서 변경되며 바로 다음 하강 또는 상승 에지에서 읽혀집니다.. 이렇게 해서 1비트의 데이터 전송이 완료됩니다.. 입력은 동일한 원칙을 따릅니다.. 따라서, 클록 신호에 최소 8번의 변화 (하나의 상승 및 하락 사이클이 하나의 변화를 구성합니다.) 전송을 허용하다 8 데이터 비트.
SCK 신호 라인은 마스터 장치에 의해서만 제어된다는 점에 유의해야 합니다., 슬레이브 장치는 신호 라인을 제어할 수 없습니다.. 비슷하게, SPI 기반 장치에서, 마스터 디바이스가 하나 이상 있어야 합니다..
이러한 전송 특성은 기존 직렬 통신과 달리 일반적인 직렬 통신에 비해 장점이 있습니다., 적어도 전송 8 지속적으로 데이터 비트, SPI를 사용하면 데이터를 비트 단위로 전송할 수 있습니다., SCK 클록 라인이 마스터 장치에 의해 제어되기 때문에 일시 중지도 허용됩니다.. 클럭 전환이 없을 때, 슬레이브 장치는 데이터를 수집하거나 전송하지 않습니다.. 다시 말해서, 마스터 장치는 SCK 클록 라인 제어를 통해 통신을 제어할 수 있습니다..
SPI 데이터 입력 및 출력 라인이 독립적이므로 SPI는 데이터 교환 프로토콜이기도 합니다., 데이터 입력과 출력을 동시에 완료할 수 있습니다..
SPI 장치마다 구현이 다릅니다., 주로 데이터가 변경되고 수집되는 시점에 관한 것입니다., 클럭 신호의 상승 에지 또는 하강 에지 수집에 대해 서로 다른 정의 사용. 구체적인 내용은, 관련 장치의 설명서를 참조하십시오..
나2기음
두 개의 버스 라인만 필요합니다. 하나는 직렬 데이터 라인 SDA이고 하나는 직렬 클럭 라인 SCL입니다..
버스에 연결된 모든 장치는 소프트웨어에 의해 설정된 고유 주소와 간단한 마스터-슬레이브 관계로 주소 지정될 수 있습니다.. 호스트는 마스터 송신기 또는 수신기 역할을 할 수 있습니다..
진정한 멀티 마스터 버스입니다.; 두 개 이상의 마스터가 동시에 데이터 전송을 시작하는 경우, 충돌 감지 및 중재로 데이터 손상 방지.
직렬 8비트 양방향 데이터 전송 속도는 표준 모드에서 최대 100kbit/s에 도달할 수 있습니다., 400고속 모드의 kbit/s, 고속 모드에서는 3.4Mbit/s.
온칩 필터는 버스 데이터 라인에서 결함을 제거하여 데이터 무결성을 보장합니다..
동일한 버스에 연결된 IC 수는 최대 버스 정전 용량인 400pF에 의해서만 제한됩니다..
UART
UART 버스는 비동기 직렬 포트입니다., 따라서 그 구조는 일반적으로 이전 두 개의 동기식 직렬 포트보다 훨씬 더 복잡합니다.. 일반적으로 전송 속도 생성기로 구성됩니다. (이는 다음과 같은 전송 속도를 생성합니다. 16 전송 전송 속도의 배), UART 수신기, UART 송신기, 하드웨어에 두 개의 전선이 있음, 하나는 송신용, 하나는 수신용.
UART는 일반적으로 직렬 장치용 컴퓨터 칩을 제어하는 데 사용됩니다.. 한 가지 주목할 점은 RS-232C 데이터 단말 장비 인터페이스를 제공한다는 것입니다., RS-232C 인터페이스를 사용하여 컴퓨터가 모뎀이나 기타 직렬 장치와 통신할 수 있도록 합니다..
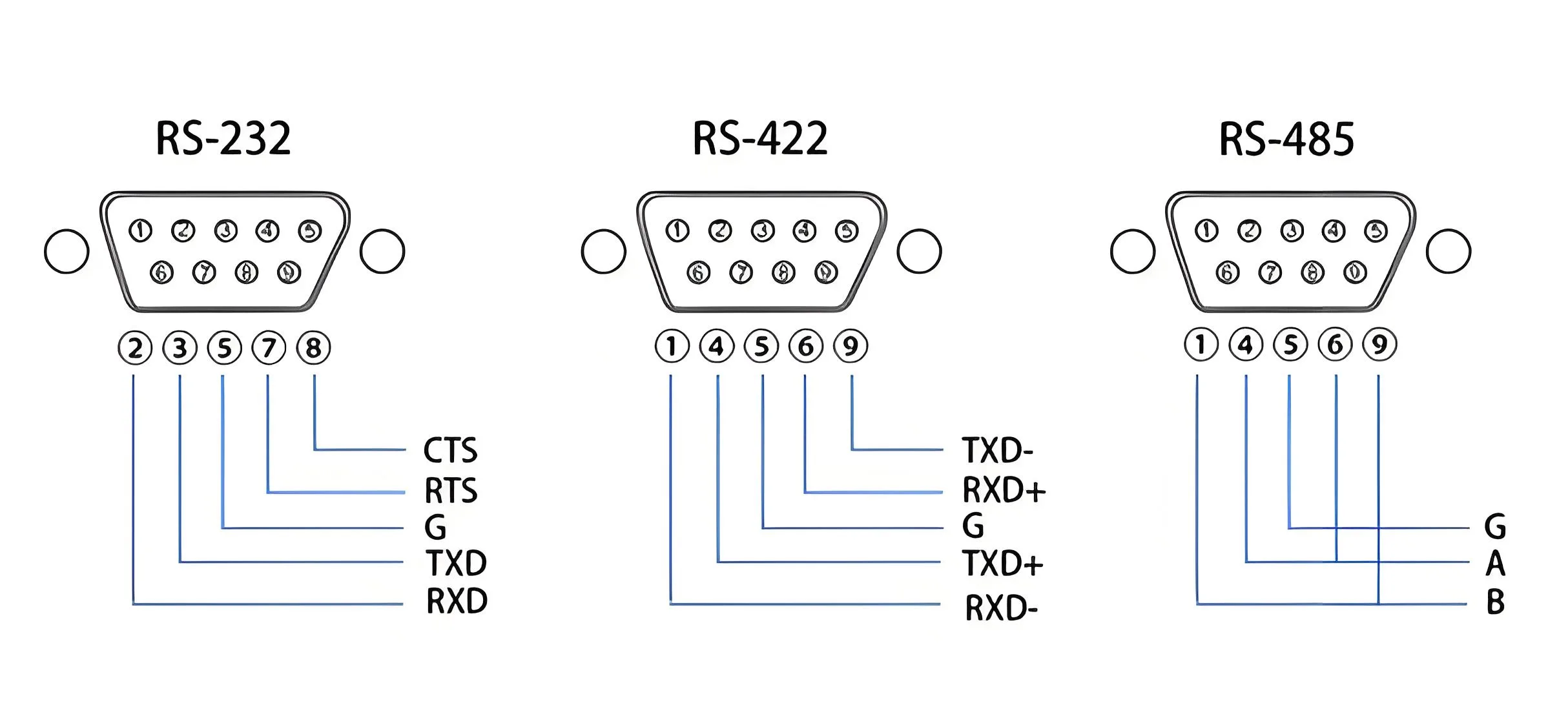
UART는 범용 비동기식 수신기/송신기를 나타냅니다. (비동기 직렬 통신 포트). RS232와 같은 인터페이스에 대한 표준 및 사양이 포함되어 있습니다., RS499, RS423, RS422, 그리고 RS485, UART를 비동기 직렬 통신 포트의 일반 용어로 만들기. RS232, RS499, RS423, RS422, 및 RS485는 다양한 비동기 직렬 통신 포트에 대한 인터페이스 표준 및 사양입니다., 전기적 특성 정의, 전송 속도, 연결 특성, 인터페이스의 기계적 특성. 그들은 물리 계층에 속합니다 (가장 낮은 층) 통신 네트워크의 개념이며 통신 프로토콜과 직접적인 관련이 없습니다.. 통신 프로토콜은 데이터 링크 계층에 속합니다. (다음 상위 레이어) 통신 네트워크의 개념. COM 포트는 PC의 비동기 직렬 통신 포트의 약어입니다. (개인용 컴퓨터). 역사적인 이유로, IBM의 PC 외부 인터페이스는 RS232로 구성되었습니다., PC 업계의 사실상 표준이 되다. 따라서, 최신 PC의 COM 포트는 모두 RS232입니다.. 여러 개의 비동기 직렬 통신 포트를 사용할 수 있는 경우, 이름은 COM1입니다., COM2, 등.
SPI와 UART 모두 전이중 통신을 달성할 수 있다는 것은 분명합니다., 하지만 I2C는 할 수 없습니다.
USART 범용 동기 비동기 수신기 및 송신기. (UART와의 차이점은 분명합니다.)
UART 범용 비동기 수신기 및 송신기;
USART 범용 동기 비동기 수신기 및 송신기. 일반적으로, 마이크로컨트롤러에서, UART라는 인터페이스는 비동기 직렬 통신에만 사용됩니다., USART라는 이름은 동기식 및 비동기식 직렬 통신에 모두 사용할 수 있습니다..
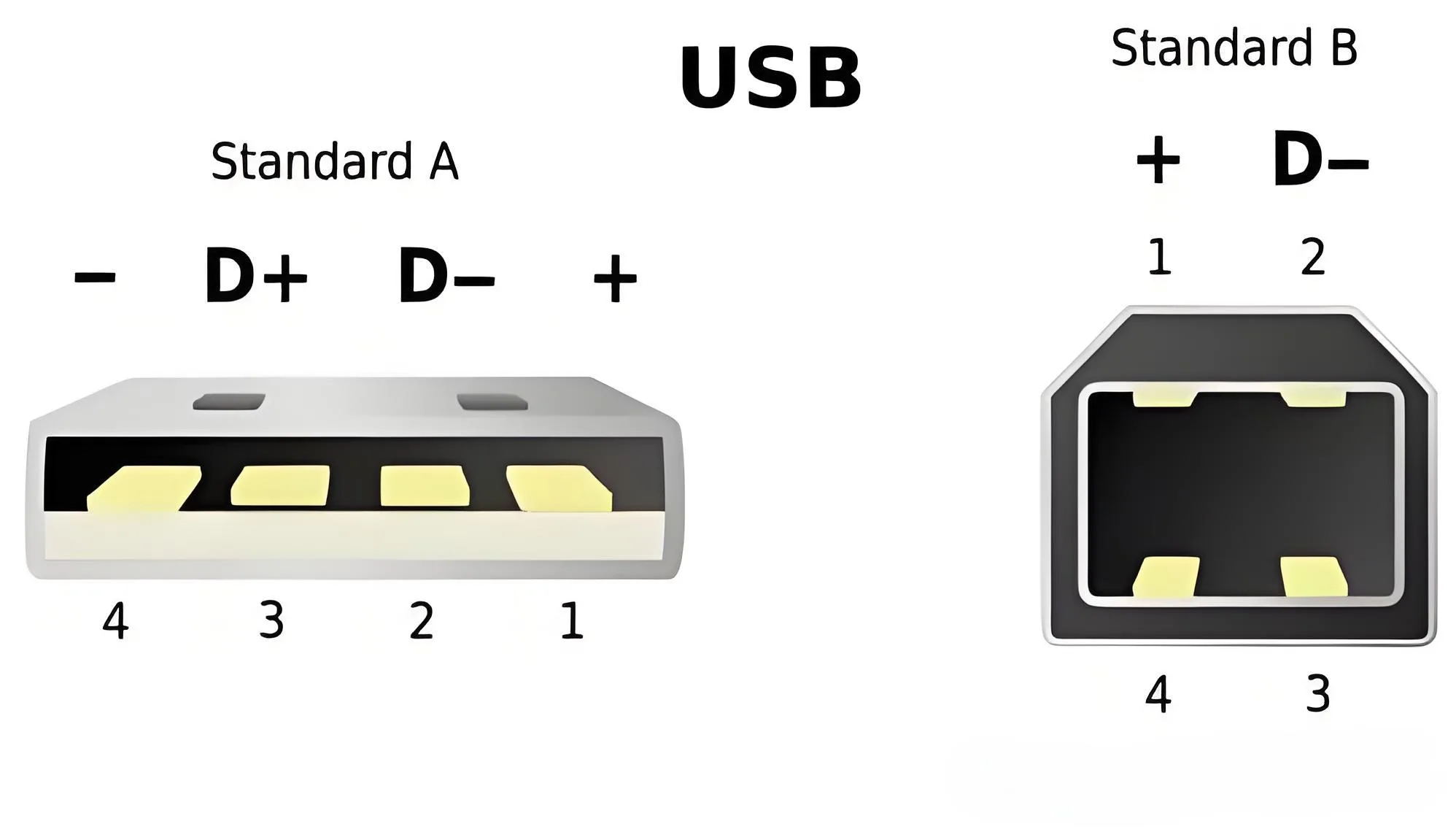
USB
USB는 범용 직렬 버스(Universal Serial Bus)를 의미합니다., 컴퓨터와 외부 장치 간의 연결 및 통신을 위한 외부 버스 표준, PC 도메인에 적용. USB는 플러그 앤 플레이 및 핫스왑 기능을 지원합니다.. USB는 Intel을 포함한 연합에 의해 제안되었습니다., 컴팩, IBM, 그리고 마이크로소프트는 결국 1994.
USB
USB의 전기적 특성과 전송 특성에는 Philips와 같은 고속 USB 트랜시버가 포함됩니다.’ 82C251, TI의 SN65/75LBC031, 보쉬 CF150, C250, Intersil의 UC5350; 저속 USB 트랜시버에는 Philips 82C252가 포함됩니다., TJA1053, 지멘스 TLE 6252G; 단선 USB 트랜시버에는 Philips AU5790이 포함됩니다., 인피니언 TLE 6255, 델파이 DK166153.
할 수 있다
버스가 한가할 때, 모든 CAN 노드에서 데이터 전송을 시작할 수 있습니다.. 두 개 이상의 노드가 동시에 전송을 시작하는 경우, 식별자 기반 비트별 중재로 액세스 충돌 해결. CAN은 모든 노드가 버스로부터 데이터를 수신하는 브로드캐스트 형태의 버스입니다., 하드웨어 필터링 메커니즘은 메시지가 노드에 제공되는지 여부를 결정합니다..
메시지 프레임에는 네 가지 유형이 있습니다. 데이터 프레임, 원격 프레임, 오류 프레임, 그리고 과부하 프레임.
기본 CAN 컨트롤러는 전송/수신을 위한 제한된 메시지 버퍼와 기본 CAN 메시지 필터링 메커니즘을 통해 비용 효율적입니다.. 전체 CAN 컨트롤러는 처리 가능한 버퍼를 통해 더 높은 비용과 성능을 제공합니다. 8 또는 더 많은 메시지를 보내고 받을 수 있습니다.. 표준 CAN 컨트롤러는 11비트 식별자로 메시지를 처리합니다., 확장된 CAN 컨트롤러는 11비트 및 29비트 식별자 메시지를 모두 처리합니다.. 시간 트리거형 CAN (TTCAN) 컨트롤러는 시간과 이벤트를 기반으로 CAN 메시지를 예약합니다., CAN 네트워크의 전반적인 성능 및 동작 예측 가능성 향상.
데이터 바이트는 최상위 비트부터 전송됩니다.. 8비트 데이터 바이트는 단일 전송 작업으로 전송될 수 있습니다., 최대 CAN 버스 속도는 1Mbps입니다..
대부분의 CAN 마이크로컨트롤러는 물리적 버스에 연결하기 위해 외부 트랜시버가 필요합니다.. 시장에서는 Philips와 같은 고속 트랜시버를 제공합니다.’ 82C251, TI의 SN65/75LBC031, 보쉬 CF150, C250, Intersil의 UC5350; Philips 82C252와 같은 저속 트랜시버, TJA1053, 및 지멘스 TLE 6252G.
직렬 버스 선택
마이크로컨트롤러 (µC) 오늘날 첨단 전자제품의 핵심, 하나 이상의 주변 장치와의 통신이 필요함. 전통적으로, µC 주변 장치는 메모리 매핑된 데이터 및 주소 버스를 통해 연결되었습니다.. 이 인터페이스 유형에는 최소 핀 수가 필요합니다. (전원 및 접지 제외) 8 (데이터) + 1 (R//W) + 1 (/CS) + n개의 주소 라인 [n = 로그2(내부 레지스터 또는 메모리 바이트 수)]. 예를 들어, 16바이트 주변 장치와 통신하려면 8 + 1 + 1 + 4 = 14 다리. 이 인터페이스는 빠른 액세스를 제공하지만 더 많은 핀 수로 인해 패키지 크기와 총 비용이 증가합니다.. 비용과 포장 크기를 줄이기 위해, 직렬 인터페이스는 이상적인 대안입니다.
직렬 버스를 선택하는 것은 쉽지 않습니다. 데이터 속도를 고려하는 것 외에도, 데이터 비트 전송 순서 (최상위 비트 첫 번째 또는 마지막), 및 전압, 설계자는 주변 장치를 선택하는 방법을 고려해야 합니다. (하드웨어 칩 선택 입력 또는 소프트웨어 프로토콜을 통해), 주변 장치가 µC와 동기화하는 방법 (하드웨어 클록 라인 또는 데이터 스트림에 내장된 클록 정보 사용), 데이터가 단일 라인으로 전송되는지 여부 (사이를 전환 “높은” 그리고 “낮은”) 또는 차동 쌍에서 (두 라인이 동시에 반대 방향으로 전환됨), 통신선이 양쪽 끝에서 정합 저항을 사용하는지 여부 (일반적으로 차동 신호용), 타의 추종을 불허하는, 또는 한쪽 끝이 일치함 (단일 종단 버스에 공통). 테이블 1 다양한 공통 버스 시스템 간의 차이점을 매트릭스 형태로 보여줍니다.. 그중 4개만 16 가능한 조합은 잘 알려져 있습니다.
이러한 특징 외에도, 특정 애플리케이션에는 전원 공급 방법과 같은 추가 요구 사항이 있을 수 있습니다., 격리, 소음 억제, 최대 µC (주인) 주변에 (노예) 전송 거리, 및 케이블 연결 방법 (버스 종류, 별 유형, 역 극성 보호, 등.). 빌딩 자동화와 같은 애플리케이션, 산업 제어, 미터 독서, 등., 그러한 요구사항에 대한 표준을 확립했습니다..
I²C/SMBus 대. 1-와이어 버스
애플리케이션이 클럭 라인을 제공할 수 있는 경우, 버스 선택은 I²C/SMBus 장치로 확장 가능. SMBus 사양에 따르면, 이는 타임아웃 기능이 추가된 100kbps I²C 버스 사양의 파생 제품으로 볼 수 있습니다.. 노드가 버스 마스터와 동기화되지 않는 경우, 타임아웃 기능으로 버스 잠김 방지, 반면 I²C 시스템은 이러한 오류 조건에서 복구하기 위해 전원 켜기 재설정이 필요합니다.. 1-Wire 시스템은 통신 인터페이스 초기화 단계 중에 존재를 재설정/감지합니다..
시계 라인 외에도, I²C/SMBus는 버스에서 전송된 모든 바이트에 대해 승인 비트를 제공합니다., 효과적인 데이터 속도를 줄입니다. 12%. 통신 프로세스는 슬레이브 장치 주소와 데이터 방향 비트가 뒤따르는 시작 조건으로 시작됩니다. (읽기/쓰기), 중지 조건으로 종료. 1-Wire 시스템의 경우, 네트워크 계층 요구 사항을 먼저 충족해야 합니다. (즉., ROM 명령어 검색이나 브로드캐스트를 통해 특정 장치 선택), 그런 다음 데이터 전송 방향에 영향을 미치는 특정 장치와 관련된 명령 코드를 보냅니다. (읽기/쓰기).
원래 I²C 및 SMBus 버스 시스템의 주목할만한 문제는 제한된 7비트 주소 공간입니다.. 이상 127 다양한 장치 유형 사용 가능, 슬레이브 주소만으로는 장치 기능을 추론하는 것이 불가능합니다.. 추가적으로, 많은 I²C 장치를 통해 사용자는 하나 이상의 주소 비트를 임의로 설정하여 버스에 여러 개의 동일한 장치를 연결할 수 있습니다., 사용 가능한 주소 공간을 더욱 줄입니다.. 주소 충돌 해결에는 버스 시스템을 특정 시간에 소프트웨어 제어에 따라 활성화될 수 있는 여러 세그먼트로 분할하는 작업이 포함됩니다.. 이를 위해서는 추가 하드웨어가 필요하고 애플리케이션 펌웨어가 복잡해집니다.. I²C 시스템에는 네트워크 노드 검색 또는 열거 기능이 부족합니다., 노드 수가 동적으로 변화하는 네트워크를 관리하기가 어렵습니다.. 이 문제는 SMBus 사양 버전의 주소 확인 프로토콜로 해결됩니다. 2.013, 지원되는 SMBus 장치는 드물지만.
SPI 및 MICROWIRE 인터페이스
SPI 및 마이크로와이어 (SPI의 하위 집합) 각 슬레이브 장치에 대해 추가 칩 선택 라인이 필요합니다.. 칩 선택 신호로 인해, SPI 프로토콜은 승인 기능을 제공하지 않고 메모리 주소 및 상태 레지스터에 대한 읽기/쓰기 명령만 정의합니다.. 일반적으로, SPI 장치는 데이터 입력 및 출력을 위해 별도의 핀을 사용합니다.. 데이터 출력은 읽기 작업 중을 제외하고 3상태이므로, 두 개의 데이터 핀을 함께 연결하여 단일 양방향 데이터 라인을 형성할 수 있습니다.. SPI 버스는 다른 버스 시스템이 필요한 기능을 제공하지 않거나 더 높은 데이터 전송 속도가 필요할 때 선택됩니다., 최대 2Mbps 이상의 속도 지원. 하지만, 특정 장치를 처리하기 위해 CS 신호를 생성하는 것은 SPI 및 MICROWIRE의 단점입니다.. I²C와 마찬가지로, 노드 검색을 지원하지 않습니다. 호스트는 논리적 슬레이브 주소에서 장치 기능을 추론할 수 없습니다., 동적으로 변화하는 노드로 인해 네트워크를 관리하기가 어렵습니다..
RS-485, LVDS, 할 수 있다, USB 2.0, 및 FireWire
이 표준은 차동 전송 특성을 보여줍니다.. 이러한 버스 시스템 중 가장 빠른 것은 FireWire와 USB입니다. 2.0, 지점 간 전기 연결을 사용하는 것. 고급 노드 또는 허브 포함, 트리 토폴로지를 사용하여 가상 버스를 형성할 수 있습니다., 소스에서 엔드포인트로 데이터 패킷 전송 (USB) 또는 피어 투 피어 (파이어와이어), 최대 480Mbps의 버스트 데이터 속도 (USB 2.0) 또는 1600Mbps (파이어와이어). 제한된 크기의 데이터 패킷과 수신/버퍼/재전송 통신 메커니즘으로 전송 시간이 늘어납니다., 따라서 효과적인 데이터 처리량 감소. USB의 토폴로지 및 프로토콜은 최대 126 노드, FireWire는 최대 63 패시브 케이블을 사용하여 최대 노드 간 거리가 4.5m인 노드. PC 주변기기용으로 설계됨, 멀티미디어, 산업 제어, 항공 애플리케이션 (FireWire만), USB 및 FireWire 장치는 핫 플러그 기능을 지원합니다.. 이 기능을 사용하면 네트워크 노드 수를 동적으로 변경할 수 있습니다..
LVDS, RS-485, CAN은 여러 호스트를 연결하는 버스 토폴로지를 구현할 수 있습니다.. 저전압 차동 신호 (LVDS) 이러한 표준 중 가장 빠른 속도를 제공합니다., 최대 10m 거리에서 100Mbps로 작동 가능. 실제 데이터 속도와 처리량은 네트워크 크기에 따라 다릅니다.. LVDS 전기 표준은 백플레인 애플리케이션용으로 설계되었으며 핫 플러그를 지원하지만 프로토콜은 포함하지 않습니다..
RS-485는 또한 전기적 매개변수만 정의합니다., 버스 라인당 부하 용량 및 최대 부하 지정 (32), 노드 측면에서가 아니라. 전기 노드의 부하는 다음보다 작을 수 있습니다. 1. 일반적인 데이터 속도는 12m 거리에서 최대 35Mbps에 도달할 수 있습니다., 1200m 거리에서는 100kbps, 데이터 수집 및 제어 애플리케이션에 충분함. RS-485 장치 프로토콜은 원래 RS-232용으로 설계된 프로토콜을 기반으로 하는 경우가 많습니다..
RS 시리즈
대조적으로, 컨트롤러 영역 네트워크 (할 수 있다) 매우 높은 보안성을 갖춘 분산 실시간 제어를 위한 통신 프로토콜을 정의합니다., 특히 자동차 및 산업 자동화 애플리케이션을 목표로 함. 데이터 속도는 최대 40m 거리에서 1Mbps부터 최대 1000m 거리에서 50kbps까지 다양합니다.. 주소 지정 방법은 메시지를 기반으로 합니다., 프로토콜 자체는 노드 수를 제한하지 않습니다.. CAN 노드는 핫 플러깅을 지원합니다., 네트워크 노드 수의 동적 변경 허용.
결론
간단하게, LIN 버스 및 SensorPath에 비해 저렴한 버스 시스템, 1-와이어 시스템은 슬레이브 장치를 위한 가장 광범위한 기능과 네트워크 드라이버를 제공합니다.. I²C 및 SMBus에는 데이터 라인과 접지, 클록 라인, VCC 전원 공급 장치가 필요하지만 다양한 장치 기능을 제공합니다.. SPI 및 MICROWIRE에는 추가 칩 선택 라인이 필요하지만 더 높은 데이터 속도를 제공합니다.. 기생 전원 공급 장치 및 네트워크 노드 검색 지원 외에도, 1-Wire 인터페이스 및 프로토콜은 핫 플러깅을 지원합니다., 일반적으로 차동 신호 및 SMBus를 사용하는 고속 시스템에서만 발견됩니다. 2.0 호환 제품. 아이버튼® 제품은 핫 플러그 가능 1-Wire 장치로 널리 사용됩니다.; 핫플러깅은 정상 작동 모드입니다.. 이 장치는 글로벌 식별 번호와 같은 응용 분야에서 매우 효과적인 것으로 입증되었습니다., 회로 기판/부품 식별 및 인증, 온도 감지, 및 작동 장치. 1-Wire 기술의 또 다른 성공적인 적용에는 저비용 인증 및 소프트웨어 코드 보호를 달성하기 위한 안전한 저장 및 질의 응답 메커니즘이 포함됩니다..

훌륭한 작업! 웹을 통해 공유되어야 하는 정보 유형입니다.. 이 게시물을 더 높은 위치에 두지 않은 것에 대해 Google이 부끄러운 일입니다.! 와서 내 웹사이트를 방문해보세요 . 감사합니다 =)