밀리미터 웨이브 레이더는 자동차 및 산업 응용 분야의 주요 감지 방법 중 하나입니다., 가혹한 환경 조건에서도 각도 및 속도 정확도.
일반적인 밀리미터 웨이브 레이더 PCBA에는 레이더 칩셋 및 기타 전자 구성 요소가 포함됩니다., 전원 관리 회로와 같은, PCB에서 조립 된 플래시 메모리 및 주변 인터페이스 장치. 전송 및 수신 안테나도 일반적으로 PCB에서 실현됩니다., 그러나 높은 안테나 성능을 달성합니다, 고주파 PCB 재료, Rogers RO3003 및 Isola 370hr과 같은, 사용해야합니다.
밀리미터 웨이브 레이더 PCB
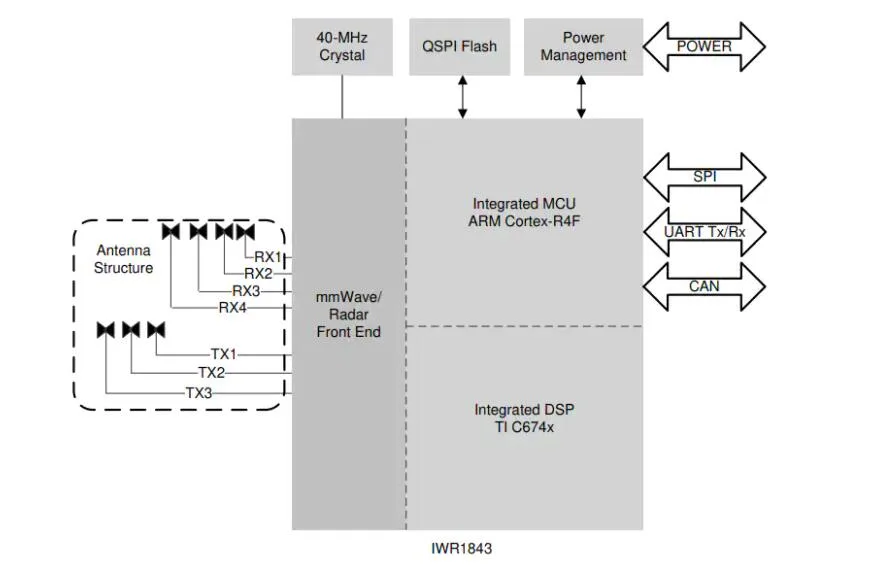
밀리미서 웨이브 레이더의 핵심 구성 요소에는 트랜시버 안테나가 포함됩니다. (TX&RX), 무선 주파수 장치 (RF), 디지털 변환기 아날로그 (ADC), 디지털 신호 프로세서 (DSP), 마이크로 컨트롤러 (MCU), 등. RF, ADC, DSP, MCU, 등. CMOS 프로세스를 통해 하나의 SOC에 직접 통합됩니다..
밀리미터 웨이브 레이더는 주로 24GHz의 4 개의 주파수 대역을 사용합니다., 60GHz, 77GHZ 및 79GHz. 24GHZ는 센티미터 파에 정확하게 속합니다. 제한된 측정 거리로 인해 (약 60m) 그리고 일반적인 결의, 넓은 시야 각도 범위에서 근거리 장애물을 감지하기 위해 종종 각도 레이더로 설계되었습니다.. 60GHz는 특히 대기 감쇠의 영향을 받기 때문입니다, 그것은 종종 차량의 활력 징후와 인력 자세를 감지하기 위해 중요한 부호 감지 레이더로 설계되었습니다.. 77GHZ와 79GHz는 종종 측정 거리가 긴 원인 레이더로 설계됩니다. (약 200m), 앞으로의 장거리 인식을위한 강력한 도구입니다. 이 두 밴드는 또한 미래 차량 장착 밀리미터 웨이브 레이더 필드의 주류 밴드입니다..
인덕터, 커패시터, 다이오드, 파워 칩, 등. 전원 공급 장치 마더 보드에 밀도로 세워집니다, 이는 주로 시스템 전원 관리를 담당합니다. 각 회사는 일반적으로 안전 컨트롤러를 IT에 통합하여 차량 통신 및 안전 관련 기능을 제공합니다..
레이더 마더 보드는 전체 밀리미터 웨이브 레이더의 핵심이라고 할 수 있습니다., 안테나를 포함하여, RF, DSP 및 제어 회로 보드.

안테나의 길이가있을 때 1/4 전자기 파 길이의, 안테나의 전송 및 수신 변환 효율이 가장 높습니다.. 밀리미터 파의 파장은 몇 밀리미터에 불과합니다., 따라서 안테나는 매우 작게 만들 수 있습니다. 여러 안테나를 사용하여 배열 안테나를 형성함으로써, 좁은 빔도 달성 할 수 있습니다, 좁은 빔은 더 높은 방위각 해상도를 의미합니다.
현재, 밀리미터 웨이브 레이더 안테나의 주류 체계는 마이크로 스트립 어레이입니다.. 가장 일반적인 디자인은 고주파 PCB에 마이크로 스트립 패치 안테나를 통합하고 레이더 마더 보드의 고주파 PCB를 통합하는 것입니다.. 이 체계는 밀리미터 파 레이더의 비용과 양을 크게 줄입니다..
밀리미터 웨이브 레이더 RF PCBA
RF는 신호 변조를 담당합니다, 전염, 수신 및 에코 신호 복조. 밀리미터 웨이브 레이더의 핵심 RF 부분입니다.. 현재, 주류 솔루션은 MMIC를 통해 위의 내용을 통합하는 것입니다. (모 놀리 식 전자 레인지 통합 회로) 기술. MMIC는 반도체 기술에 의해 반도체 기판에서 수동 및 활성 부품을 제조하는 기술입니다..
밀리미터 웨이브 레이더 필드에서, 실리콘 게르미늄 기술을 기반으로 한 MMIC 통합 기능 회로는 주로 저음 증폭기를 포함합니다., 전력 증폭기, 믹서, 탐지기, 변조기, 전압 제어 발진기, 위상 시프터, 스위치 및 기타 구성 요소. 송신기, 수신기와 DSP는 모두 독립 단위입니다, 밀리미서 웨이브 레이더의 설계 프로세스와 전체 볼륨이 비교적 큰.
COMS 기술 개발과 함께, 한편으로는 MMIC가 작아집니다, 반면에, DSP 및 MCU와의 통합에 대한 기술적 타당성을 제공합니다.. 끝에 2016, TI는 CMOS 기술을 기반으로 한 고도로 통합 된 77GHz 밀리미터 웨이브 레이더 칩 AWR1642를 출시했습니다., 프론트 엔드 MMIC 통합, 단일 SOC의 DSP 및 MCU. 밀리미터 파 레이더의 비용을 크게 줄이는 동시에, 또한 개발의 어려움을 크게 줄입니다.
밀리미터 웨이브 레이더 PCBA의 DSP
다른 신호 처리 알고리즘을 포함시켜, 특정 유형의 대상 정보를 얻기 위해 프론트 엔드에서 신호가 수집 된 경우 DSP 추출. DSP는 밀리미터 파 레이더의 안정성과 신뢰성의 핵심입니다..
밀리미터 파도 레이더 PCBA의 제어 회로
밀리미터 웨이브 레이더의 제어 회로는 DSP의 대상 정보 출력 및 차량 본문 동적 정보에 따라 데이터 퓨전을 운반합니다., 마지막으로 주 프로세서를 통해 의사 결정 처리를 수행합니다..
전자기파를 방사하는 다양한 방법에 따라, 밀리미터 파 레이더는 주로 두 가지 유형으로 나뉩니다: 펄스 파동 운영 체제 및 연속파 운영 체제.
Pulse Wave Technology는 밀리미터 웨이브 레이더가 짧은 시간에 피크 전력으로 짧은 펄스를 전달한다고 말합니다., 도플러 주파수 및 TOF 원리를 기반으로 객체 속도 및 거리 측정을 실현합니다., 병렬 수신 안테나에 의해 수신 된 동일한 대상에 의해 반사 된 펄스 파의 위상차에 기초한 각도 측정을 실현합니다.. 높은 힘 때문에, 큰 혼란의 백그라운드에서 장거리로 작은 진폭으로 움직이는 대상을 감지 할 수 있습니다.. 그러나 그것은 또한 높은 비용의 단점을 가져옵니다, 대량 및 고전력 소비. 현재, 이 방법은 차량 장착 밀리미터 웨이브 레이더 분야에서 거의 채택되지 않습니다..
연속파 기술은 FSK로 나눌 수도 있습니다 (주파수 시프트 키잉, 단일 대상의 거리와 속도를 측정 할 수 있습니다.), CW (일정한 주파수 연속파, 속도 측정에만 사용할 수 있지만 거리 측정에는 사용할 수 없습니다.) 및 FMCW (주파수 변조 연속파). 그 중, FMCW, 고해상도 및 저렴한 비용.
안테나를 수신하는 밀리미터 웨이브 레이더로부터 전송 된 전자기파를 수신 한 후, 에코 신호와 전송 된 신호는 믹서서로 전송됩니다.. 전송 된 신호가 측정 된 대상과 반환에 직면함에 따라, 에코 신호의 주파수는 전송 된 신호와 비교하여 변경되었습니다.. 믹서의 목적은 전송 된 신호와 에코 신호 사이의 주파수 차이를 계산하는 것입니다., IF 신호라고합니다. IF 신호에는 측정 된 대상의 범위 비밀이 포함됩니다., 측정 된 목표의 범위 정보는 필터링과 같은 후속 처리 후에 얻을 수 있습니다., 확대, 아날로그-디지털 변환 및 주파수 측정.
속도 측정 용, 밀리미터 웨이브 레이더에 의해 수신 된 에코 신호의 위상은 측정 된 대상의 거리가 다르기 때문에 다릅니다.. 프레임의 모든 단일 Chirp 신호는 동일한 간격으로 샘플링됩니다., 샘플링 지점의 데이터는 푸리에 변환됩니다., 그런 다음 측정 된 목표의 속도는 위상차를 사용하여 측정됩니다..
각도 측정의 경우, 다중 수신 안테나는 동일한 에코 신호를 수신하고 각도 측정을 달성하기 위해 에코 신호 사이의 위상차를 계산하는 데 사용됩니다..
Thur1843의
3D 밀리미서 웨이브 레이더
밀리미터 웨이브 레이더는 거리를 출력 할 수 있습니다, 속도 및 각도 정보, 이를 3d 밀리미터 웨이브 레이더라고도합니다. 그리고이 거리 d와 각도 θ 그것은 평면 극지 좌표계에 레이더와 함께 설치된 자체 차량의 데이터입니다.. 극지 좌표계를 직교 좌표계로 변환함으로써, X 및 Y 방향으로 대상 차량에서 셀프 차량까지의 거리를 얻을 수 있습니다.. 이때, 치수의 z 방향으로의 거리는 누락되었음을 알 수 있습니까?. 이것은 또한 비판을받은 3d 밀리미터 웨이브 레이더의 단점 중 하나입니다..
하지만, 이 단점은 정적 객체에 치명적입니다. 맨홀이 덮습니다, 스피드 범프, 공중에 매달려있는 다양한 표지판, 높은 구조, 고정 차량, 등. 도로 중간에서는 3d 밀리미터 파 레이더로 결정할 수 없습니다. 이러한 장애물이 높이 정보 부족으로 인해 트래픽에 영향을 미치는지 여부. 정적 객체의 경우, 제조업체는 단순하고 조잡합니다, 자신감을 직접 무시하거나 크게 줄입니다. 이것은 또한 Tesla의 초기 사고의 이유 중 하나입니다.. 카메라는 타락한 흰색화물 자동차를 식별하지 못했습니다., 그리고 밀리미터 웨이브 레이더는 그랬습니다. 하지만, 의사 결정에 대한 신뢰는 너무 낮았습니다, 차량이 자동 비상 자동 기능을 유발하지 않음.
4D 밀리미서 웨이브 레이더
4d 밀리미터 파 레이더의 가장 놀라운 특징은 피치 각도를 정확하게 감지 할 수 있다는 것입니다., 측정 된 대상의 실제 높이 데이터를 얻기 위해, 즉, 직교 좌표계의 z 축 방향에서 대상 객체의 거리는. 이 기능으로, 4d 밀리미터 웨이브 레이더는 고정 물체를 식별 할 수 있습니다, 그리고 가장 짧은 나무 조각이 추가되었습니다. 게다가, 4d 밀리미터 파 레이더의 해상도도 크게 향상되었습니다.. 수평 및 수직 해상도입니다 1 ° 및 2 ° 각각, 그리고 수평 해상도입니다 5-10 일반 3d 밀리미터 파 레이더보다 높은 시간.














