
Você deve ter visto várias interfaces em muitas placas de circuito de dispositivos eletrônicos, como gpio, I2c, Spi, Uart, Usar, USB, etc.. Você deve estar curioso sobre os princípios de trabalho, propósitos, e diferenças entre essas interfaces nas placas de circuito. Hoje, Nosso editor visitou colegas do Departamento Técnico da Companhia UGPCB para explicar seus “natureza verdadeira.”
Interfaces de comunicação
Diferenças simples
1) Gpio (Saída de entrada de propósito geral) é uma entrada/saída de uso geral, Porto geral, Extender de ônibus que simplifica a expansão de E/S usando o padrão industrial I2C, SMBUS™, ou spi™ interfaces. Quando microcontroladores ou chipsets não têm portas de E/S suficiente, ou quando os sistemas requerem comunicação ou controle serial remoto, Os produtos GPIO podem fornecer funções adicionais de controle e monitoramento.
2) Spi (Interface periférica em série) é um barramento serial bidirecional síncrono padrão de quatro fios. A interface SPI é usada principalmente na EEPROM, CLARÃO, relógios em tempo real, Conversores de anúncios, e entre processadores de sinal digital e decodificadores de sinal digital. SPI é uma alta velocidade, Full-Duplex, barramento de comunicação síncrona que ocupa apenas quatro pinos no chip, Salvando contagens de pinos e espaço de layout da PCB. Devido às suas características simples e fáceis de usar, Mais e mais chips estão integrando este protocolo de comunicação.
3) EU2C (Barramento inter-IC) é um ônibus em série de dois fios desenvolvido pela Philips para conectar microcontroladores e seus dispositivos periféricos. É um padrão de barramento amplamente adotado no campo do controle de comunicação microeletrônica. Tem as vantagens de menos linhas de interface, Métodos de controle simples, pequenos formulários de embalagem de dispositivos, e taxas de comunicação mais altas.
4) Uart (Transmissor de receptor assíncrono universal) é um receptor/transmissor assíncrono universal.
5) Transmissor de receptor assíncrono sincronizado universal USART;
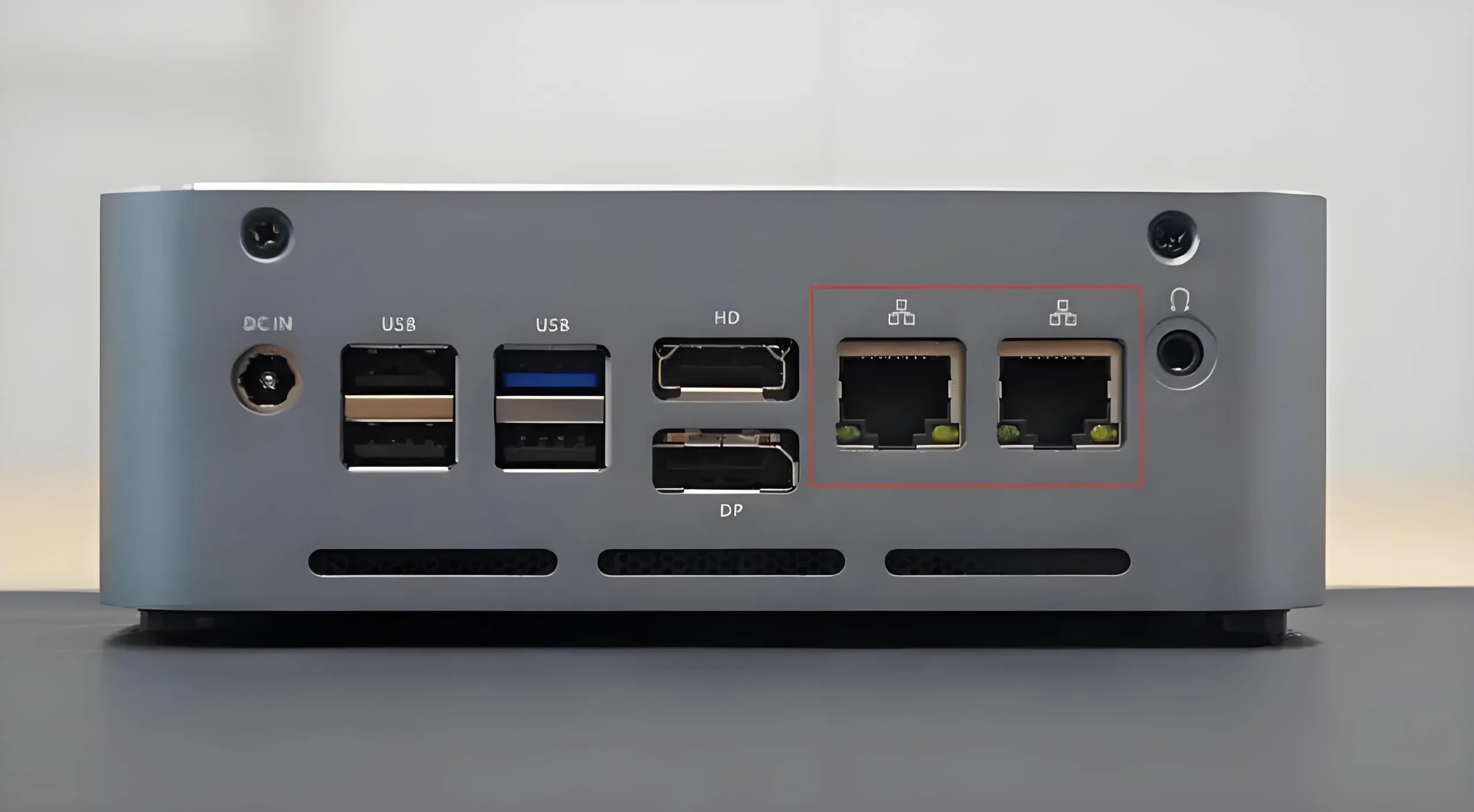
6) Ônibus serial universal USB (Ônibus serial universal)
7) Pode fieldbus
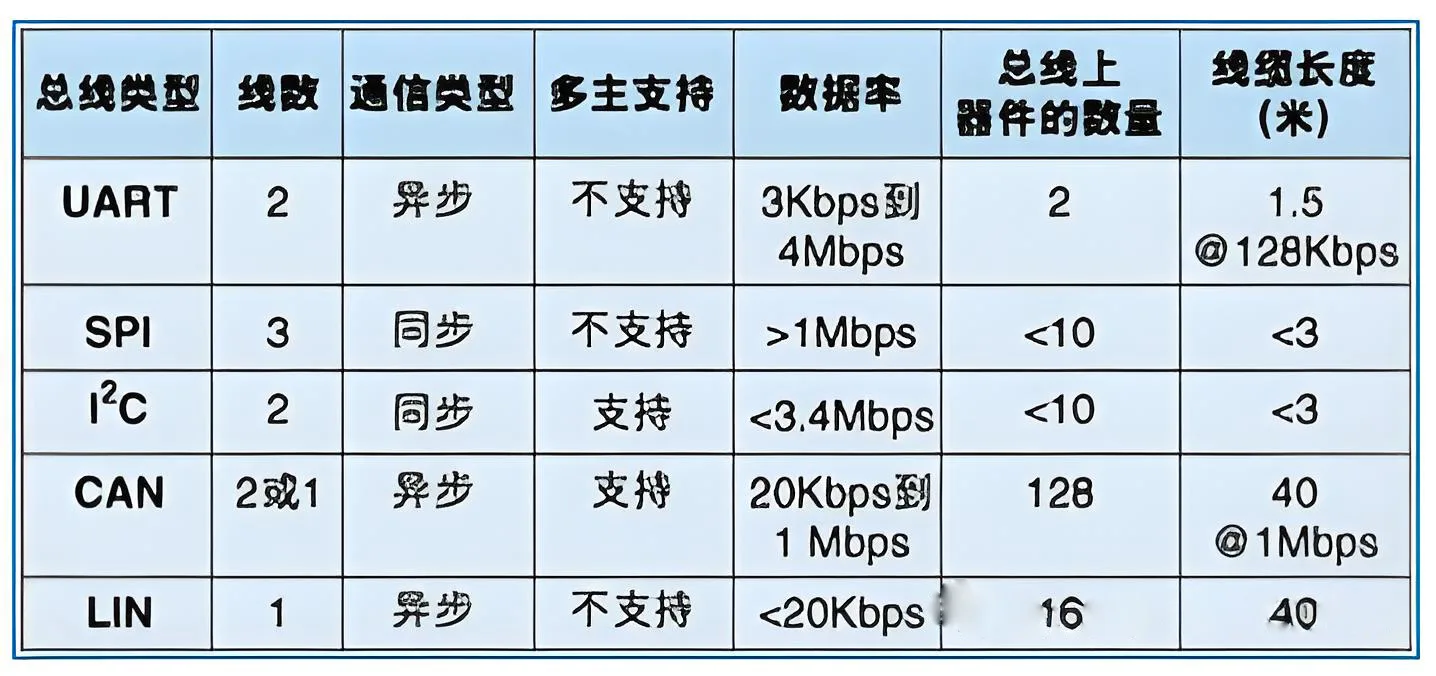
Tabela de parâmetros de transmissão de interface
Composição das linhas de dados de transmissão
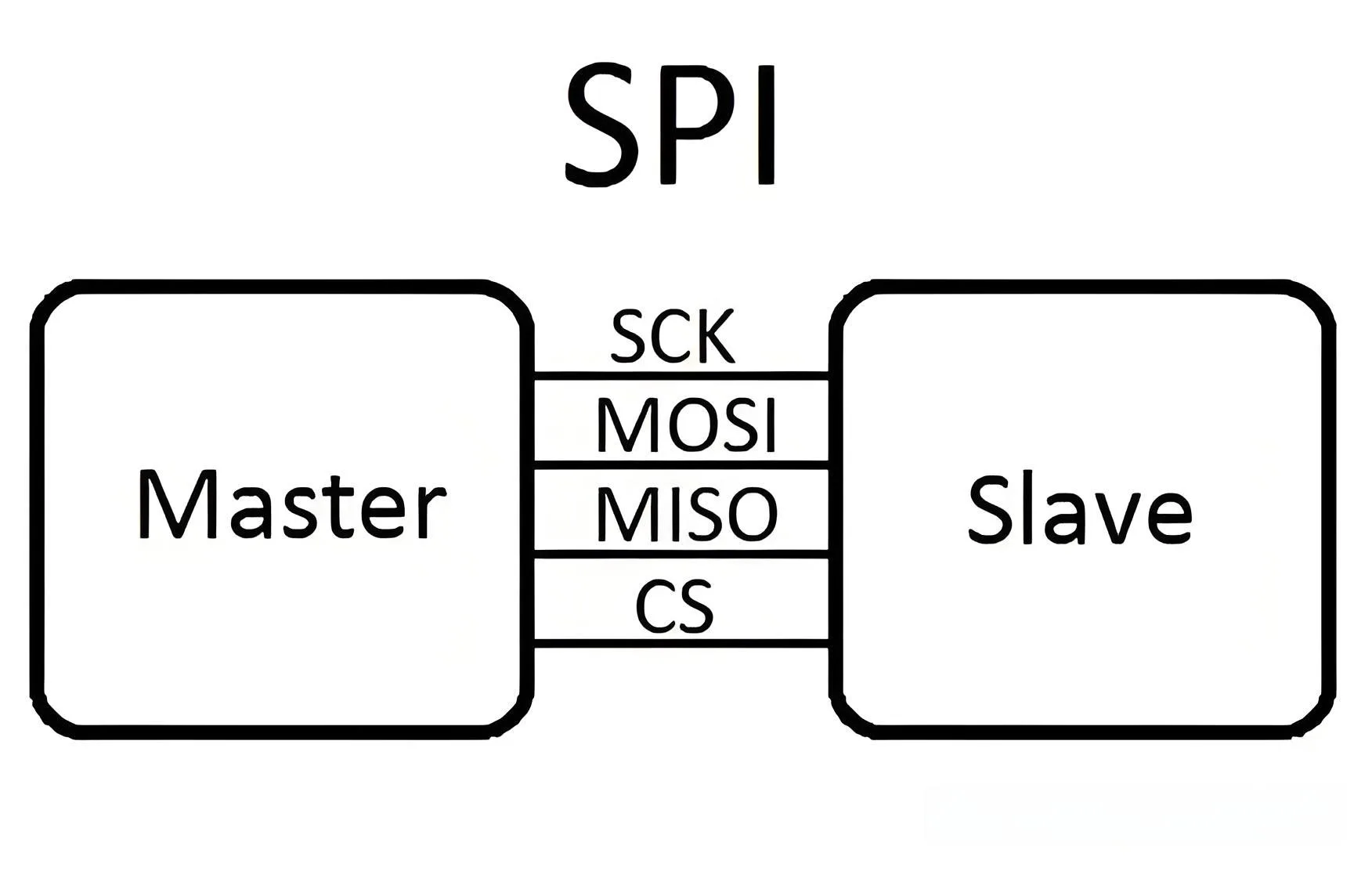
O ônibus SPI consiste em três linhas de sinal relógio serial (Sclk), Saída de dados serial (Sdo), e entrada de dados serial (SDI). O barramento SPI pode conectar vários dispositivos SPI. O dispositivo SPI que fornece o relógio SPI é o mestre ou o dispositivo principal (Mestre), Enquanto outros dispositivos são escravos ou dispositivos escravos (Escravo). Dispositivos mestre e escravo podem obter comunicação complexa duplex. Quando existem vários dispositivos escravos, Uma linha de seleção de escravos adicionais pode ser adicionada.
Se simular o ônibus SPI com as portas gerais de IO, é necessário ter uma porta de saída (Sdo), uma porta de entrada (SDI), e dependendo do tipo de dispositivo implementado, Outra porta se implementar dispositivos mestre e escravo, exigindo portas de entrada e saída; Se apenas implementar dispositivos mestre, Uma porta de saída é suficiente; Se apenas implementar dispositivos escravos, Uma porta de entrada é necessária.
O ônibus I2C é de mão dupla, dois fios (SCL, SDA), serial, padrão de interface com vários mestres com um mecanismo de arbitragem de barramento, tornando-o muito adequado para curto alcance, Comunicações de dados pouco frequentes entre dispositivos. Em seu sistema de protocolo, Ao transmitir dados, O endereço do dispositivo de destino está incluído, ativar a rede de dispositivos.
Se simular o barramento i2C com portas IO gerais para transmissão bidirecional, uma porta de entrada/saída (SDA) é necessário, e outra porta de saída (SCL) é necessário. (Observe que minha compreensão do I2C é relativamente limitada, Portanto, essa descrição pode estar incompleta.)
O ônibus UART é uma porta serial assíncrona, Portanto, geralmente tem uma estrutura muito mais complexa do que as duas portas seriais síncronas anteriores (conforme introduzido em livros de microcontrolador, Embora não seja considerado complexo). Geralmente consiste em um gerador de taxas de transmissão (A taxa de transmissão gerada é igual a 16 vezes a taxa de transmissão de transmissão), um receptor UART, e um transmissor UART, com dois fios em hardware, um para enviar e outro para receber.
Claramente, Se simular o ônibus UART com portas de IO general, Uma porta de entrada e uma porta de saída são necessárias.
Do segundo ponto, É evidente que o SPI e o UART podem alcançar o duplex completo, Mas I2C não pode.
Diferenças de protocolo de comunicação
Spi
Spi
O SPI é um protocolo que permite que um dispositivo mestre inicie a comunicação síncrona com um dispositivo escravo, concluindo assim a troca de dados. Este método de comunicação tem a vantagem de ocupar menos portos; geralmente, Quatro são suficientes para comunicação básica. Ao mesmo tempo, A velocidade de transmissão também é muito alta. Geralmente, Requer que o dispositivo mestre tenha um controlador SPI (Mas também pode ser simulado) para se comunicar com chips baseados em SPI.
O princípio da comunicação do SPI é muito simples; requer pelo menos quatro fios, Mas três também podem ser suficientes. Eles são comuns a todos os dispositivos baseados em SPI SDI (entrada de dados), Sdo (saída de dados), Sck (relógio), Cs (CHIP SELECT). O CS controla se o chip está selecionado, Operações de significado neste chip só são eficazes quando o sinal de seleção de chip está em um sinal de ativação predeterminado (alto nível ou baixo nível). Isso permite que vários dispositivos SPI sejam conectados no mesmo ônibus.
Em seguida são as três linhas responsáveis pela comunicação. A comunicação é concluída através da troca de dados. Aqui, É importante saber que o SPI é um protocolo de comunicação serial, Significado dados são transmitidos pouco a pouco. É por isso que a linha do relógio SCK existe. O SCK fornece pulsos de relógio, e SDI, Transmissão completa de dados SDO com base nesses pulsos. A saída de dados ocorre através da linha SDO; Alterações de dados na borda crescente ou em queda do relógio e são lidas no seguinte a seguir ou nascentes em vantagem. Um pouco de transmissão de dados é concluído dessa maneira. A entrada segue o mesmo princípio. Por isso, pelo menos oito mudanças no sinal do relógio (Um ciclo para cima e para baixo constitui uma mudança) permitir a transmissão de 8 bits de dados.
Deve -se notar que a linha de sinal SCK é controlada apenas pelo dispositivo mestre, e os dispositivos escravos não podem controlar a linha de sinal. De forma similar, em um dispositivo baseado em SPI, Deve haver pelo menos um dispositivo mestre.
Essa característica de transmissão tem uma vantagem sobre as comunicações em série típicas, diferentemente da comunicação serial convencional, que transmite pelo menos 8 bits de dados continuamente, O SPI permite que os dados sejam transmitidos pouco a pouco, e até permite uma pausa porque a linha do relógio SCK é controlada pelo dispositivo mestre. Quando não há transição de relógio, O dispositivo escravo não coleta ou transmite dados. Em outras palavras, O dispositivo mestre pode controlar a comunicação através do controle da linha do relógio SCK.
O SPI também é um protocolo de troca de dados, pois as linhas de entrada e saída de dados SPI são independentes, Eles permitem a conclusão simultânea de entrada e saída de dados.
Diferentes dispositivos SPI têm implementações diferentes, principalmente em termos de quando os dados mudam e são coletados, com definições diferentes para coleta na borda ascendente ou em queda do sinal do relógio. Para detalhes específicos, Consulte a documentação dos dispositivos relevantes.
EU2C
Apenas duas linhas de barramento são necessárias uma linha de dados serial sda e uma linha de relógio serial scl.
Cada dispositivo conectado ao barramento pode ser abordado com um endereço exclusivo e um relacionamento simples de escravos mestre definido por software. O host pode atuar como um transmissor ou receptor mestre.
É um verdadeiro ônibus de vários mestres; Se dois ou mais mestres iniciarem simultaneamente a transferência de dados, Detecção e arbitragem de conflitos impedem a corrupção de dados.
As taxas de transferência bidirecional de dados bidirecionais em série podem atingir até 100kbit/s no modo padrão, 400kbit/s em modo rápido, e 3,4Mbit/s no modo de alta velocidade.
Os filtros no chip removem falhas da linha de dados do barramento para garantir a integridade dos dados.
O número de ICs conectados ao mesmo barramento é limitado apenas pela capacitância máxima do barramento de 400pf.
Uart
O ônibus UART é uma porta serial assíncrona, Portanto, sua estrutura é geralmente muito mais complexa do que as duas portas seriais síncronas anteriores. Normalmente consiste em um gerador de taxas de transmissão (que gera uma taxa de transmissão igual a 16 vezes a taxa de transmissão de transmissão), um receptor UART, e um transmissor UART, com dois fios em hardware, um para enviar e outro para receber.
UART é comumente usado para controlar chips de computador para dispositivos seriais. Um ponto a ser observado é que ele fornece uma interface RS-232C Data Terminal Equipment, permitindo que os computadores se comuniquem com modems ou outros dispositivos seriais usando a interface RS-232C.
UART significa receptor/transmissor assíncrono universal (porta de comunicação serial assíncrona). Inclui padrões e especificações para interfaces como Rs232, RS499, RS423, RS422, e RS485, Tornando o UART um termo geral para portas de comunicação serial assíncrona. RS232, RS499, RS423, RS422, e RS485 são padrões e especificações de interface para várias portas de comunicação serial assíncrona, Definindo características elétricas, taxas de transmissão, Características de conexão, e propriedades mecânicas das interfaces. Eles pertencem à camada física (a camada mais baixa) conceito na rede de comunicação e não está diretamente relacionado aos protocolos de comunicação. Protocolos de comunicação pertencem à camada de link de dados (a próxima camada superior) conceito na rede de comunicação. A porta COM é uma abreviação para a porta de comunicação serial assíncrona em um PC (computador pessoal). Devido a razões históricas, A interface externa do PC da IBM foi configurada como Rs232, tornando -se o padrão de fato na indústria de PC. Por isso, As portas COM nos PCs modernos são todos Rs232. Se várias portas de comunicação serial assíncrona estiverem disponíveis, Eles são nomeados com1, Com2, etc..
É claro que tanto o SPI quanto o UART podem alcançar a comunicação complexa, Mas I2C não pode.
Receptor e transmissor assíncronos e transmissores síncronos universais. (A diferença do UART é evidente.)
Uart universal receptor e transmissor assíncronos;
Receptor e transmissor assíncronos e transmissores síncronos universais. Geralmente, em microcontroladores, Interfaces denominadas UART são usadas apenas para comunicação em série assíncrona, Enquanto os chamados USART podem ser usados para comunicação serial síncrona e assíncrona.
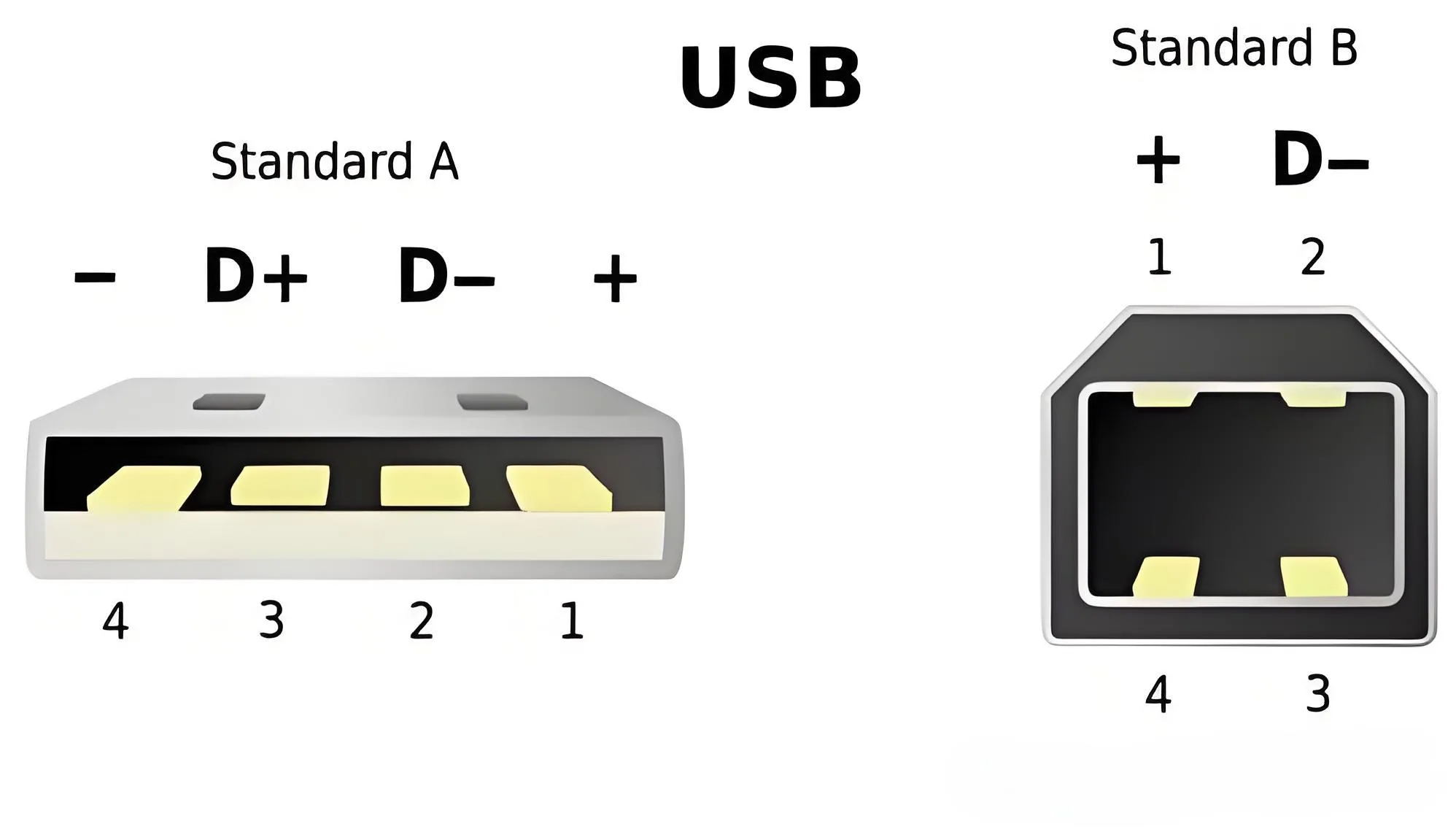
USB
USB significa Bus Serial Universal, um padrão de barramento externo para conectar e comunicar entre um computador e dispositivos externos, Aplicado no domínio do PC. USB suporta as funções plug-and-play e hot-swap. USB foi proposto por uma coalizão, incluindo a Intel, Compaq, IBM, e Microsoft no final de 1994.
USB
As características elétricas e as características da transmissão do USB incluem transceptores USB de alta velocidade como Philips’ 82C251, SN65/75LBC031 da TI, CF150 de Bosch, C250, e UC5350 da Intersil; Transceptores USB de baixa velocidade incluem Philips 82C252, TJA1053, Siemens tle 6252g; Transceptores USB de fio único incluem Philips AU5790, Infineon tle 6255, Delphi DK166153.
PODE
Quando o ônibus está ocioso, Qualquer nó pode iniciar a transmissão de dados. Se dois ou mais nós começarem a transmissão simultaneamente, A arbitragem bit-bit baseada em identificador resolve conflitos de acesso. Can é um barramento do tipo transmissão, onde todos os nós recebem dados do barramento, e um mecanismo de filtragem de hardware determina se a mensagem é fornecida ao nó.
Existem quatro tipos de quadros de dados de quadros de mensagem, quadro remoto, quadro de erro, e quadro de sobrecarga.
Os controladores básicos de lata são econômicos com buffers de mensagem limitados para enviar/recebimento e os mecanismos de filtragem de mensagens básicos podem. Os controladores de lata completos oferecem maior custo e desempenho com buffers capazes de manusear 8 ou mais mensagens para enviar e receber. Os controladores de lata padrão lidam com mensagens com identificadores de 11 bits, Enquanto os controladores de lata estendidos lidam com mensagens de identificador de 11 e 29 bits. Canada no tempo pode (Ttcan) O cronograma dos controladores pode mensagens com base no tempo e nos eventos, aprimorando o desempenho geral e a previsibilidade do comportamento da rede de latas.
Bytes de dados são transmitidos a partir da parte mais significativa. Um byte de dados de 8 bits pode ser transmitido em uma única operação de envio, com a velocidade máxima de barramento de lata sendo 1 Mbps.
A maioria pode os microcontroladores exigem um transceptor externo para se conectar ao barramento físico. O mercado oferece transceptores de alta velocidade como a Philips’ 82C251, SN65/75LBC031 da TI, CF150 de Bosch, C250, e UC5350 da Intersil; e transceptores de baixa velocidade como Philips 82C252, TJA1053, e siemens tle 6252g.
Escolhendo o ônibus em série
Microcontroladores (µC) estão no centro dos produtos eletrônicos avançados de hoje, exigindo comunicação com um ou mais dispositivos periféricos. Tradicionalmente, Os periféricos µC foram conectados através de dados mapeados de memória e barramentos de endereço. Este tipo de interface requer um número mínimo de pinos (excluindo poder e terra) 8 (dados) + 1 (R // w) + 1 (/Cs) + n linhas de endereço [n = log2(registro interno ou contagem de bytes de memória)]. Por exemplo, comunicar com um periférico de 16 bytes exige 8 + 1 + 1 + 4 = 14 pinos. Esta interface oferece acesso rápido, mas aumenta o tamanho do pacote e o custo total devido ao maior número de pinos. Para reduzir custos e tamanhos de embalagem, Interfaces em série são alternativas ideais.
Selecionar um ônibus em série não é fácil. Além de considerar as taxas de dados, Pedido de transmissão de bits de dados (Bit mais significativo primeiro ou último), e tensão, Os designers devem considerar como selecionar um periférico (via chip de hardware Selecione entradas ou protocolo de software), Como os periféricos sincronizam com µc (Usando uma linha de relógio de hardware ou informações de relógio incorporadas no fluxo de dados), se os dados são transmitidos em uma única linha (alternando entre “alto” e “baixo”) ou em um par diferencial (duas linhas alternando em direções opostas simultaneamente), e se as linhas de comunicação usam resistência correspondente nas duas extremidades (geralmente para sinalização diferencial), incomparável, ou combinado em uma extremidade (comum para ônibus de ponta única). Mesa 1 mostra diferenças entre vários sistemas de barramento comuns em forma de matriz. Apenas quatro dos 16 Possíveis combinações são bem conhecidas.
Além dessas características, Aplicações específicas podem ter requisitos adicionais, como métodos de fonte de alimentação, isolamento, supressão de ruído, Máximo μC (hospedar) para periférico (escravo) distância de transmissão, e métodos de conexão a cabo (Tipo de barramento, Tipo de estrela, Proteção de polaridade reversa, etc.). Aplicações como automação de construção, controle industrial, Leitura do medidor, etc., estabeleceram padrões para tais requisitos.
I²C/SMBUS vs.. 1-Barramento de arame
Se o aplicativo puder fornecer uma linha de relógio, A seleção de ônibus pode se estender aos dispositivos I²C/SMBUS. De acordo com a especificação SMBUS, Pode ser visto como um derivado da especificação de barramento de 100kbps I²C com recursos adicionais de tempo limite. Nos casos em que um nó perde a sincronização com o mestre de ônibus, O recurso de tempo limite impede o bloqueio do ônibus, Enquanto o sistema I²C exige uma redefinição de energia para se recuperar de tais condições de falha. O sistema de 1 fio redefine/detecta a presença durante a fase de inicialização da interface de comunicação.
Além da linha do relógio, I²C/SMBUS fornece um bit de reconhecimento para todos os bytes transmitidos no ônibus, reduzindo as taxas de dados efetivas por 12%. O processo de comunicação começa com uma condição de partida seguida pelo endereço do dispositivo escravo e um bit de direção de dados (Leia/escreva), terminando com uma condição de parada. Para o sistema de 1 fio, Os requisitos da camada de rede devem ser atendidos primeiro (Ou seja,, Selecionando um dispositivo específico através de comandos de pesquisa de ROM ou transmissão), Em seguida, enviando códigos de comando relacionados a dispositivos específicos que afetam a direção da transmissão de dados (Leia/escreva).
Um problema notável com os sistemas de ônibus I²C e SMBUS originais é o seu espaço de endereço de 7 bits limitado. Com mais de 127 Diferentes tipos de dispositivos disponíveis, É impossível inferir a funcionalidade do dispositivo apenas do endereço de escravo. Adicionalmente, Muitos dispositivos I²C permitem que os usuários defina arbitrariamente um ou mais bits de endereço para anexar vários dispositivos idênticos no barramento, reduzindo ainda mais o espaço de endereço disponível. Abordar a resolução de conflitos envolve segmentar o sistema de barramento em vários segmentos que podem ser ativados sob controle de software a qualquer momento. Isso requer hardware adicional e complica o firmware do aplicativo. Os sistemas I²C não têm recursos de descoberta ou enumeração de nó de rede, Tornando um desafio gerenciar redes com contagens de nó em mudança dinamicamente. Este problema é abordado pelo protocolo de resolução de endereço na versão SMBUS Specification 2.013, Embora os dispositivos SMBUs suportados sejam raros.
Interface SPI e microondas
SPI e Micro -Ondire (Um subconjunto de SPI) requer uma linha de seleção de chip adicional para cada dispositivo de escravo. Devido ao sinal de seleção do chip, O protocolo SPI define apenas comandos de leitura/gravação para endereços de memória e registros de status sem fornecer funcionalidade de reconhecimento. Tipicamente, Os dispositivos SPI usam pinos separados para entrada e saída de dados. Como a saída de dados é tri-estado, exceto durante as operações de leitura, Os dois pinos de dados podem ser conectados juntos para formar uma única linha de dados bidirecional. Os ônibus SPI são escolhidos quando outros sistemas de barramento não fornecem as funcionalidades necessárias ou quando são necessárias taxas de transferência de dados mais altas, suportando até 2mbps ou taxas mais altas. No entanto, Gerar sinais de CS para abordar dispositivos específicos é uma desvantagem de SPI e microondas. Como i²c, Eles não suportam a descoberta do nó. O host não pode inferir a funcionalidade do dispositivo de endereços de escravos lógicos, dificultando o gerenciamento de redes com os nós de mudança dinamicamente.
RS-485, LVDs, PODE, USB 2.0, e Firewire
Esses padrões ilustram características de transmissão diferencial. Os mais rápidos entre esses sistemas de ônibus são Firewire e USB 2.0, que usam conexões elétricas ponto a ponto. Com nós avançados ou hubs, Eles podem formar ônibus virtuais com topologias de árvores, Enviando pacotes de dados de fonte para endpoint (USB) ou ponto a ponto (Firewire), com taxas de dados de explosão de até 480mbps (USB 2.0) ou 1600Mbps (Firewire). Pacotes de dados de tamanho limitado e mecanismos de comunicação de recebimento/buffer/reenvios aumentam o tempo de transmissão, reduzindo assim a taxa de transferência de dados eficaz. A topologia e protocolo da USB permitem 126 nós, Enquanto Firewire apoia até 63 nós com uma distância máxima de nó-nó de 4,5m usando cabos passivos. Projetado para periféricos de PC, multimídia, controle industrial, e aplicações de aviação (Apenas Firewire), Os dispositivos USB e Firewire suportam a plugagem a quente. Este recurso permite mudanças dinâmicas na contagem de nós de rede.
LVDs, RS-485, e pode implementar topologias de barramento conectando vários hosts. Sinalização diferencial de baixa tensão (LVDs) oferece a velocidade mais alta entre esses padrões, capaz de operar a 100 Mbps em distâncias de até 10m. A taxa de dados e a taxa de transferência reais dependem do tamanho da rede. O padrão elétrico do LVDS foi projetado para aplicações de backplane e suporta o plugging quente, mas não inclui nenhum protocolo.
RS-485 também define apenas parâmetros elétricos, Especificando a capacidade de carga e cargas máximas por linha de ônibus (32), não em termos de nós. A carga de um nó elétrico pode ser menor que 1. As taxas de dados típicas podem atingir até 35 Mbps em distâncias de 12m, e 100kbps em distâncias de 1200m, suficiente para aquisição de dados e aplicativos de controle. Os protocolos de dispositivos RS-485 geralmente são baseados em protocolos originalmente projetados para RS-232.
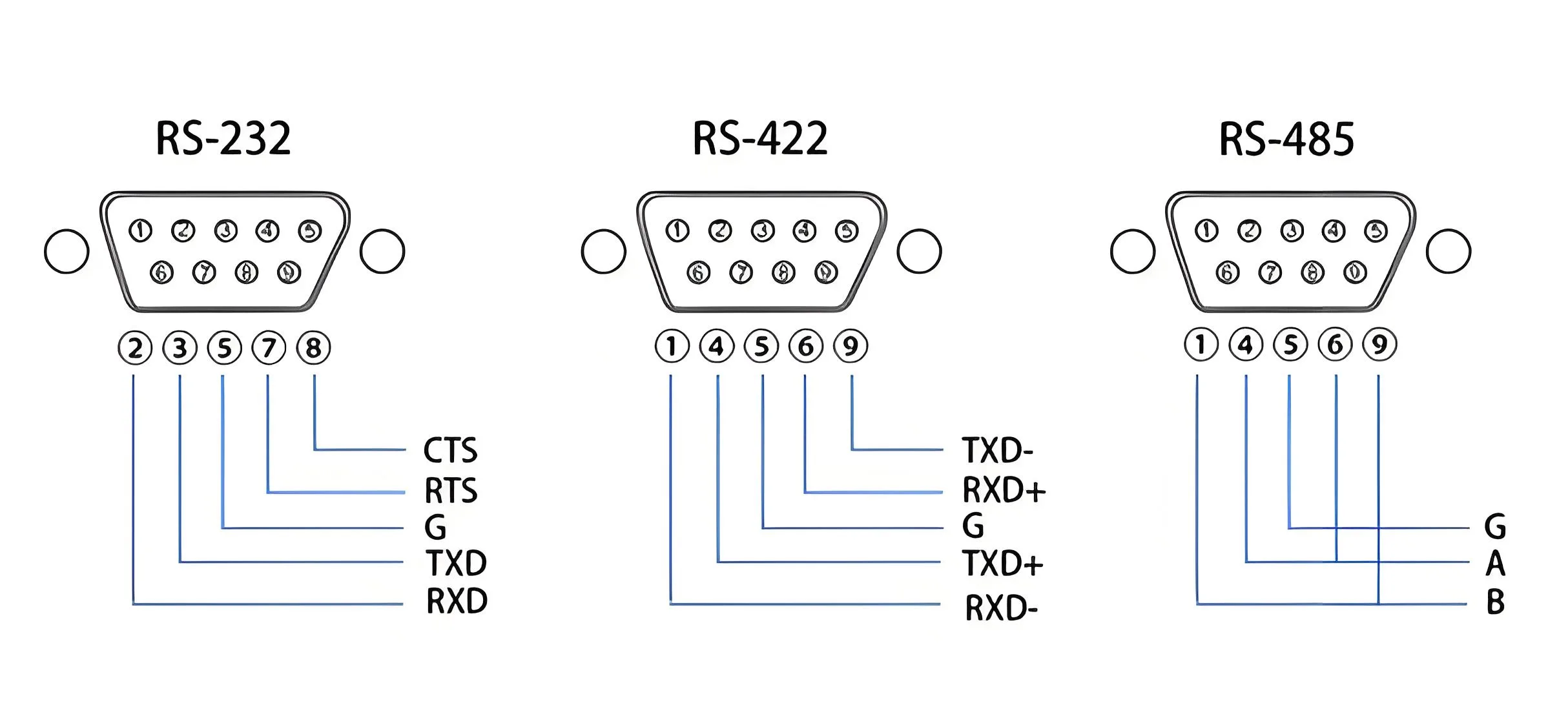
Série RS
Em contraste, a rede de área do controlador (PODE) define um protocolo de comunicação para controle em tempo real distribuído com segurança muito alta, especificamente destinado a aplicações de automação automotiva e industrial. As taxas de dados variam de 1 Mbps em distâncias de até 40m a 50kbps em distâncias de até 1000m. O método de endereço é baseado em mensagens, e o próprio protocolo não limita o número de nós. Os nós podem suportar o pluging a quente, permitindo mudanças dinâmicas na contagem de nós de rede.
Conclusão
Em simples, Sistemas de ônibus de baixo custo em comparação com os ônibus e sensorpath, 1-Os sistemas de arame oferecem a maior variedade de funções e drivers de rede para dispositivos escravos. I²C e SMBUS requerem linhas de dados e terrenos, além de linhas de relógio e fontes de alimentação VCC, mas oferecem muitas funcionalidades do dispositivo. SPI e microondas requerem linhas de seleção de chips adicionais, mas fornecem taxas de dados mais altas. Além de apoiar a fonte de alimentação parasitária e a descoberta de nó de rede, A interface de 1 fio e o protocolo suportam plugagem a quente, Geralmente encontrado apenas em sistemas de alta velocidade usando sinalização diferencial e SMBUs 2.0 Produtos compatíveis. Ibutton® Os produtos são amplamente utilizados como dispositivos de 1 fios quentes de quente; Plugugging quente é o modo de operação normal. Esses dispositivos se mostraram altamente eficazes em aplicações como números de identificação global, placa de circuito/identificação e certificação de componentes, detecção de temperatura, e dispositivos de atuação. Outra aplicação bem-sucedida da tecnologia de 1 fio inclui mecanismos seguros de armazenamento e resposta a desafios para obter autenticação de baixo custo e proteção de código de software.
